i also looking for tutorial in youtube and some codes in github but my head start to dizzy. i get my offset value for calibrating MPU-6050 using program by Jeff Rowberg
please how to add this value in program? since the example library already display the data in m/s^2 unit, so when I substract it directly it become unvalid value, i also dunno what unit is this offset? and i need to calibrate it because my Z-axis accelero display ~11 m/s^2 which not valid cause it must be aroun 9.8 due to gravity.
Hey @sinus_20 , have you tried using the example code in the library of jeff rowberg, MPU6050 - IMU_Zero.ino,
If you read from line number 44 to 73 in this link you will find what jrowberg mean by offsets and how you should use them, hope this helps. Thank you!
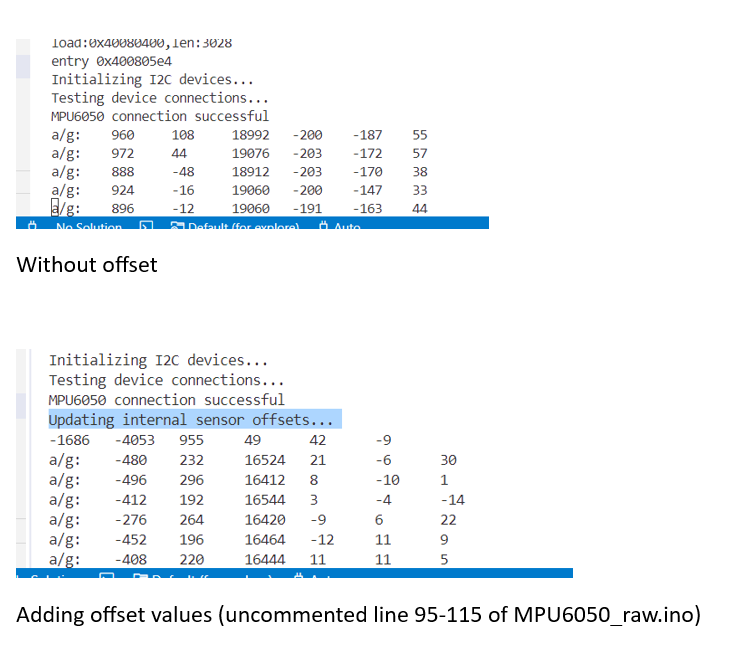
thank u @iamaryang, i read those library example for mpu6050_raw data and imu_zero, so this far i understand that offset is only apply in raw data, right? i try to upload the example mpu6050_raw data with some modification from line 94
but i still don't understand the correlation with m/s^2 unit cause in adafruit_mpu6050 there's no such thing as function to get calibrate value.
then i try IMU_zero, but it turns out error in line 255 ('SetAveraging' was not declared in this scope), i thought i should declare it first since I use platform.io instead of arduino.ide, other void function can be executed since all of them are outside the void loop, so i still can't upload it to my esp32 microcontroller, please help me, i really saw many post about this mpu-6050 calibration issue but still can't figure out the solutions.