Hallo lezers,
Voor mijn eerste Arduino Project heb ik mijzelf een beetje in het diepe gegooid.
Dit is wat ik probeer te bereiken. En voor een aantal minuten werkte dat goed, maar na de 3e keer aanzetten knipperde het powerlampje op de Arduino, en tikte de motor met dezelfde soort puls. Wanneer ik de arduino geïsoleerd aansluit via USB brand het powerlampje constant, maar wordt de Micro niet meer herkend door de IDE. In een vlaag van verstandsverbijstering heb ik een vervangende Arduino geplaatst en ook die heeft het zelfde lot ondergaan. Nu heb ik nog twee namaak Pro Micro's over om het project mee af te ronden, tenzij de Arduinos nog te redden zijn. Ik weet niet of ze bricked zijn of doorgebrand, maar er is geen visuele schade zichtbaar. Wel worden ze redelijk warm bij het aansluiten.
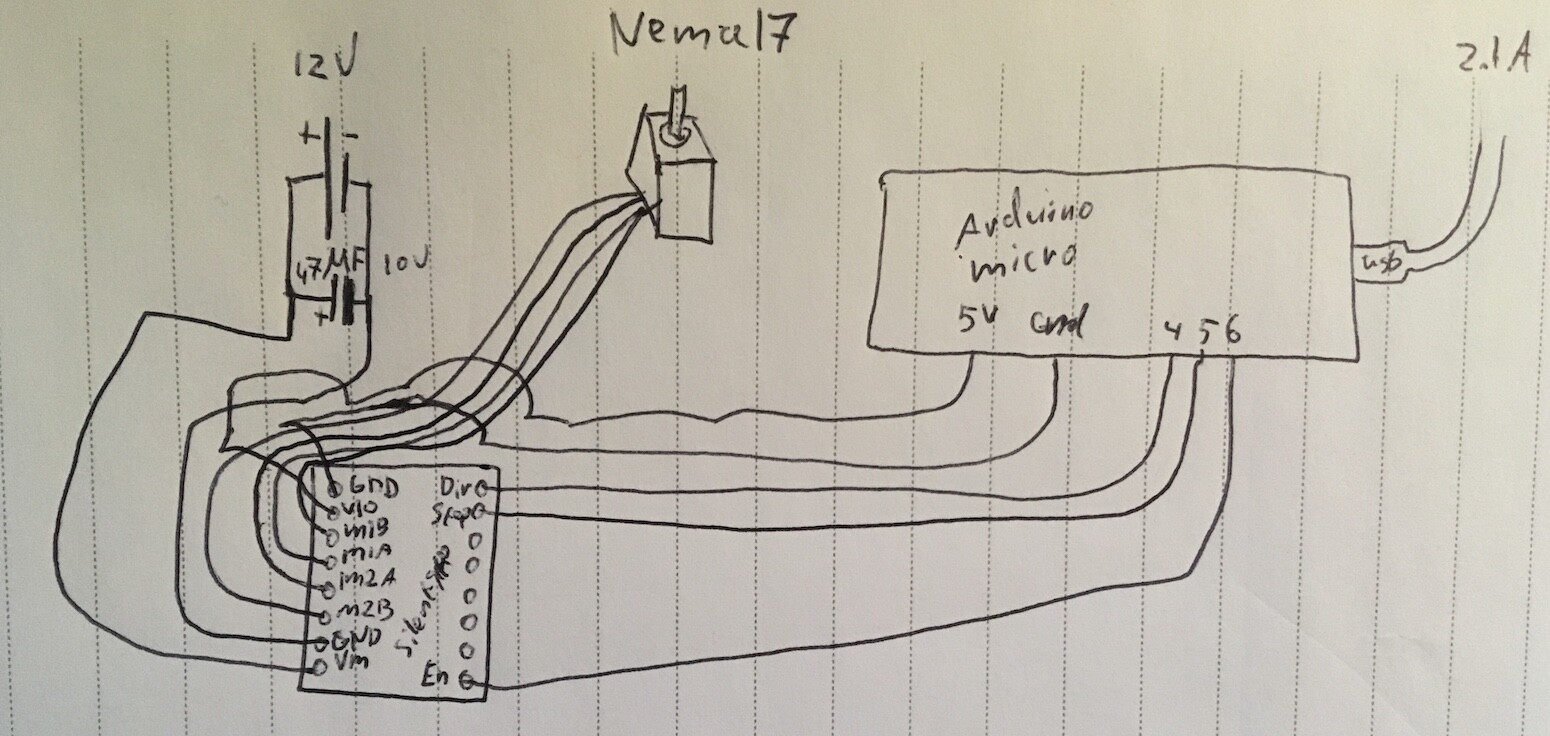
Bijgevoegd heb ik een foto van het projectje en ik heb geprobeerd het schema te tekenen, dit is niet bijzonder goed gelukt, mijn excuses.
Ik gebruik een 12V adapter om de stepper-driver van stroom te voorzien en het logic-gedeelte van de stepper-driver(TMC2100) wordt gevoed via de 5V output van de arduino, die op zijn beurt gevoed wordt via USB.
Wat mij zelf opvalt is dat ik in de code maar 2 pins aangeef, een 3e zou misschien naar de Enable moeten van de Driver. Ik heb de kabel wel verbonden maar die niet in de code aangegeven, is het überhaupt nodig dit te doen? Het heeft in principe al gewerkt zónder deze in de code te declaren.
Verder heb ik slechts een 10V condensator tussen de + en - van de adapter gedaan op aanraden van iemand. Ik heb echter geen idee waarom, en of dat wel goed gaat aangezien het een 12V adapter is. Ook hier gene zichtbare schade, tot zover.
Ik ben geen fervente programmeur, en er zijn waarschijnlijk diverse betere manieren om te bereiken wat ik wil. Maar hier is mijn poging:
#include "AccelStepper.h"
// Define a stepper and the pins it will use
AccelStepper stepper(4,5);
int StepSpeed; // scaled version of stepper speed in steps per second(?)), uses a cosine to vary in speed
int Counter; // counts the amount of updates before adding to the index of the cosine; The time it takes to progress the cosine
int Index; // drives the cosine that varies the stepperspeed (Scale)
int WavDir; // direction of rotation
int Mod; // introduces an extra modulation in speed for extra unpredictability
int ModCounter; // counts amount of updates before adding to the index of the extra mod
int ModIndex; // index that in turn drives another cosine to extra modulate the speed, maybe this should be a sine wave instead,
bool WavDirEva;
void setup()
{
int speed = 1000;
stepper.setMaxSpeed(speed);
stepper.setAcceleration(100);
stepper.setSpeed(1000);
Serial.begin(9600);
Counter = 0;
StepSpeed = 0;
Index = 0;
Mod = 0;
ModIndex = random(0,628);
WavDir = random(-1,1);
if (WavDir== 0) {WavDir = 1;}
WavDirEva = false;
}
void loop()
{
Counter = Counter + 1;
if (Counter >= Mod) // after this many updates changes speed by adding 1 index
{
StepSpeed = ((( cos ( Index / 100.0 ) * -0.5 ) + 0.5 ) * 1000 ) * WavDir; // cosine because it starts at the most outward amplitude, making it more smooth around both extremes
// the * -1 + 1 makes the cos start at 0 and climb up to, perhaps better to multiply the StepSpeed with the mod rather than add it. So that the mod can have a random beginning point without losing the "fade in"
Index = Index + 1;
Counter = 0;
if (Index == 628){ //6,28 = (2*pi) almost a full cos cycle.
Index = 0;
}
// Serial.println(StepSpeed);
}
ModCounter = ModCounter + 1; //introduces an extra modulation for stepperspeed.
if (ModCounter == 10000)
{
ModIndex = ModIndex + 1;
Mod = (((cos(ModIndex/100.0)*-0.5)+0.5)*1000)+1500; // Maximum should be 1000 steps p/s. So compensate in StepSpeed
ModCounter = 0;
if(ModIndex == 628)
{
ModIndex = 0;
}
// Serial.println(Mod);
if (StepSpeed != 0 && WavDirEva == true)
{
WavDirEva = false;
}
if (StepSpeed == 0 && WavDirEva == false) // somewhere here something is still wrong, causing too often a negative stepspeed
{
WavDir = random(-1,1);
if (WavDir== 0)
{
WavDir = 1;
}
// Serial.println(WavDir);
WavDirEva = true;
}
Serial.println(StepSpeed);
// Serial.println(Mod);
// Serial.println(WavDirEva);
}
stepper.move(StepSpeed);
stepper.run();
}
Wat ik wil dat de motor doet is vanuit stilstand heel vloeiend versnellen, maar over het algemeen langzaam blijft. Dan weer vertraagd tot stilstand, en af en toe van richting veranderd bij het 0-punt van de snelheid.
Ik heb me laten vertellen dat ik de Arduino zelf samen met de driver kan voeden met de 12V adapter. En alsnog het Logic-deel van de driver voed via de 5V output van de Arduino Micro.
Al met al ben een ontzettende beginner en heb ik eigenlijk nauwelijks een idee van wat ik aan het doen ben, met name aan de hardware kant. Kan iemand me helpen? Hulp wordt ontzettend gewaardeerd!
Jorick