I have a simple RC receiver, transmitter, an Arduino Mega, and an S51 servo.
I want to write my own code to control my servo, but if I send a signal from the transmitter, I want the RC transmitter to override anything that is happening in the code.
I cannot seem to find a single example of this override online. This should be very easy.
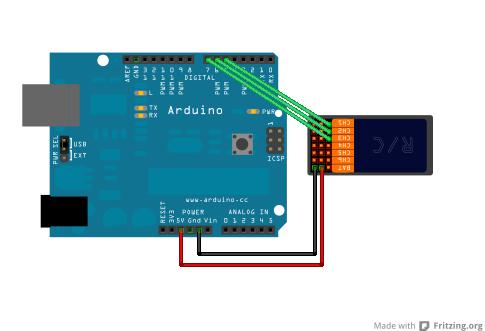
So far I connected the servo to the RC receiver and the receiver to the Arduino Mega and I am able to control it through the RC transmitter.
// First Example in a series of posts illustrating reading an RC Receiver with
// micro controller interrupts.
//
// Subsequent posts will provide enhancements required for real world operation
// in high speed applications with multiple inputs.
//
// http://rcarduino.blogspot.com/
//
// Posts in the series will be titled - How To Read an RC Receiver With A Microcontroller
// See also http://rcarduino.blogspot.co.uk/2012/04/how-to-read-multiple-rc-channels-draft.html
#define THROTTLE_SIGNAL_IN 0 // INTERRUPT 0 = DIGITAL PIN 2 - use the interrupt number in attachInterrupt
#define THROTTLE_SIGNAL_IN_PIN 2 // INTERRUPT 0 = DIGITAL PIN 2 - use the PIN number in digitalRead
#define NEUTRAL_THROTTLE 1500 // this is the duration in microseconds of neutral throttle on an electric RC Car
volatile int val;
volatile int nThrottleIn = NEUTRAL_THROTTLE; // volatile, we set this in the Interrupt and read it in loop so it must be declared volatile
volatile unsigned long ulStartPeriod = 0; // set in the interrupt
volatile boolean bNewThrottleSignal = false; // set in the interrupt and read in the loop
// we could use nThrottleIn = 0 in loop instead of a separate variable, but using bNewThrottleSignal to indicate we have a new signal
// is clearer for this first example
#include <Servo.h>
Servo servo;
#define SERVO_PIN 3
void setup()
{
// tell the Arduino we want the function calcInput to be called whenever INT0 (digital pin 2) changes from HIGH to LOW or LOW to HIGH
// catching these changes will allow us to calculate how long the input pulse is
attachInterrupt(THROTTLE_SIGNAL_IN, calcInput, CHANGE);
servo.attach(SERVO_PIN);
Serial.begin(9600);
}
void loop()
{
// if a new throttle signal has been measured, lets print the value to serial, if not our code could carry on with some other processing
if (bNewThrottleSignal)
{
//val = map(nThrottleIn, 1092, 1928, 0, 180);
Serial.println(nThrottleIn);
delay(100);
//servo.write(val);
// set this back to false when we have finished
// with nThrottleIn, while true, calcInput will not update
// nThrottleIn
bNewThrottleSignal = false;
}
else {
Serial.println("Bla bla bla, we are here because the transmitter is not on");
delay(100);
}
}
void calcInput()
{
// if the pin is high, its the start of an interrupt
if (digitalRead(THROTTLE_SIGNAL_IN_PIN) == HIGH)
{
// get the time using micros - when our code gets really busy this will become inaccurate, but for the current application its
// easy to understand and works very well
ulStartPeriod = micros();
}
else
{
// if the pin is low, its the falling edge of the pulse so now we can calculate the pulse duration by subtracting the
// start time ulStartPeriod from the current time returned by micros()
if (ulStartPeriod && (bNewThrottleSignal == false))
{
nThrottleIn = (int)(micros() - ulStartPeriod);
ulStartPeriod = 0;
// tell loop we have a new signal on the throttle channel
// we will not update nThrottleIn until loop sets
// bNewThrottleSignal back to false
bNewThrottleSignal = true;
}
}
}
{kind=link}