Hello All,
While I'm not exactly new to using an Arduino, I'd still put my level of experience slightly above novice. I apologize in advance for my ignorance in what may seem obvious to you. Any and all suggestions are greatly appreciated.
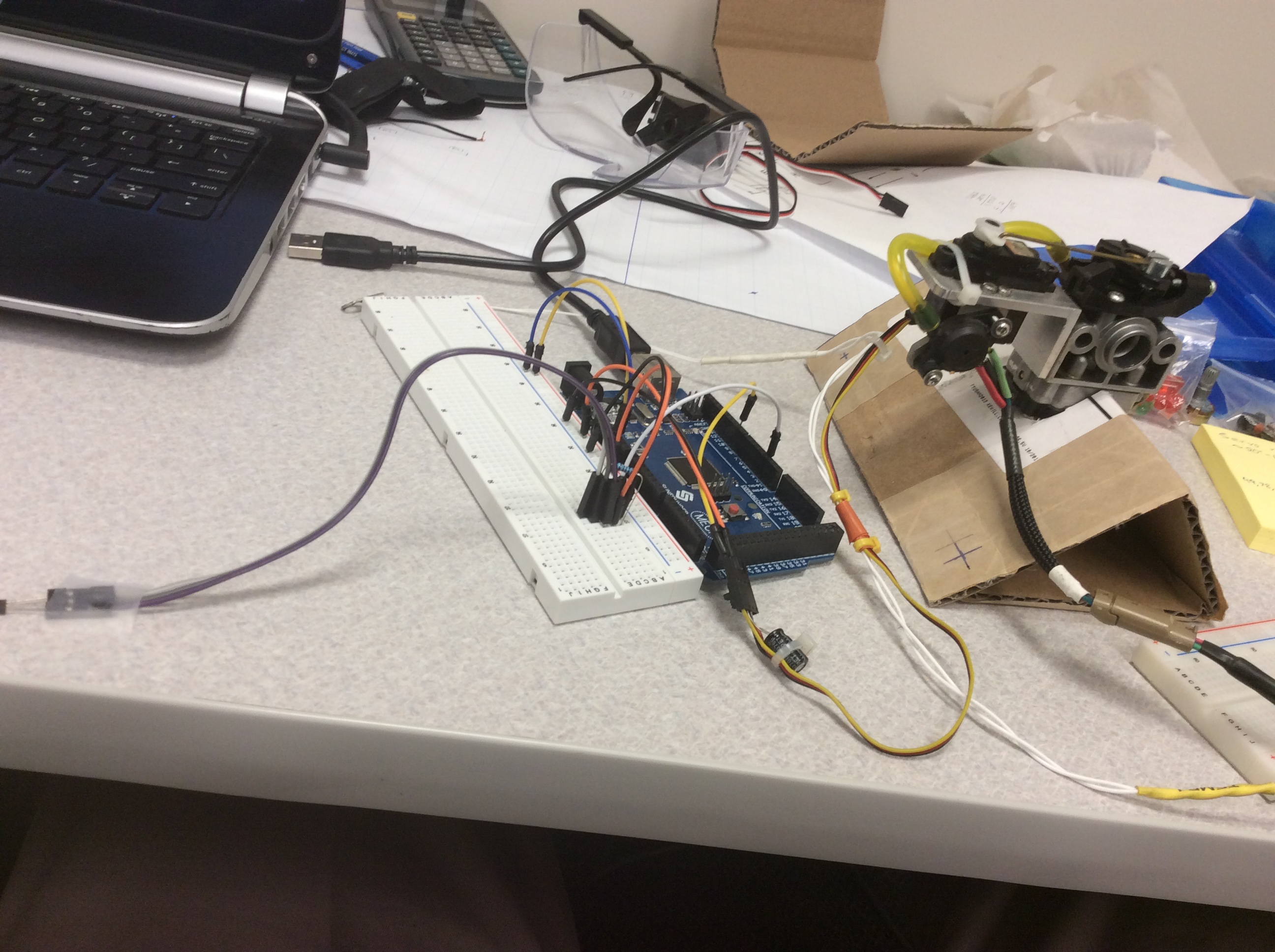
As the subject title states, I am trying to control the opening and closing of a throttle via a hobby servo but also implementing PID control. I'm using the <PID_v1.h> library. Currently, I'm using a hall sensor to calculate the RPM of a fan that I can control with a potentiometer (Image attached). In a different setup I observed that with the magnets attached to the fan, max RPM was approximately 2500 RPM which is my reason for choosing that number in the code when mapping the input. I have the RPM of the fan as Input, a Setpoint currently specified at 1500. I believe the Output should be the angle of the servo which will ultimately dictate RPM by throttle control. When I run the code below the servo is not responding and I'm getting an output value of 0.
You'll notice in the code that I commented out the variable "Output" in the loop function as I felt it was circumventing the PID control (not sure if I'm correcting for thinking this) as it would work flawlessly regardless of the gain values. I'm still learning as I go but I'm concerned I'm no longer going in the right direction. Once again, any help is appreciated. Thank you.
#include <PID_v1.h>
#include <Servo.h>
Servo myServo;
volatile byte half_rev;
unsigned int rpm;
unsigned long previousTime;
double Setpoint; // will be the desired throttle opening for a desired rpm value
double Input; // rpm reading from hall sensor
double Output; // throttle
//int Out = (int) Output;
//PID parameters
double Kp = 10, Ki = 0, Kd = 0;
//create PID instance
PID myPID(&Input,&Output, &Setpoint, Kp, Ki, Kd, REVERSE);
void setup()
{
Serial.begin(9600);
//Hardcode the rpm value
Setpoint = 1500;
//Turn the PID on
myPID.SetMode(AUTOMATIC);
//Adjust PID values
//myPID.SetTunings(Kp, Ki, Kd);
//Set the output limits
myPID.SetOutputLimits(0,180);
//Set servo motor to pin 9
myServo.attach(9);
attachInterrupt(0, rpm_calc, RISING);
half_rev = 0;
previousTime = 0;
}
void loop()
{
if (half_rev >= 20) // RPM is updated every 20 counts of a rising edge. For a better RPM resolution increase but for faster update decrease.
{
rpm = 30*1000/(millis() - previousTime)*half_rev; // NOTE: this works for two interrupts per full rotation.
previousTime = millis();
half_rev = 0;
}
//Read the value of the calculated rpm from the hall sensor. Motor input: 0 to ~2500.
Input = map(rpm, 0, 2500, 0, 255);
//Output = map(Input, 0, 255, 180, 0);
myPID.Compute(); //PID calculation
//Write the output as calculated by the PID function
myServo.write(Output); // Servo motor is set to digital pin 9 this is a pwm pin
//analogWrite(9,Output); // Servo motor is set to digital pin 9 this is a pwm pin
//digitalWrite(servoPin,Output);
//Send data by serial for plotting
/*Serial.print(Input);
Serial.print(" ");
Serial.println(Output);
Serial.print(" ");
Serial.println(Setpoint);*/
Serial.print("RPM =\t");
Serial.print(rpm);
Serial.print("\tPWM =\t");
Serial.print(Input);
Serial.print("\tOutput =\t");
Serial.println(Output);
}
void rpm_calc()//This function is called whenever a magnet/interrupt is detected by the arduino
{
half_rev++;
}