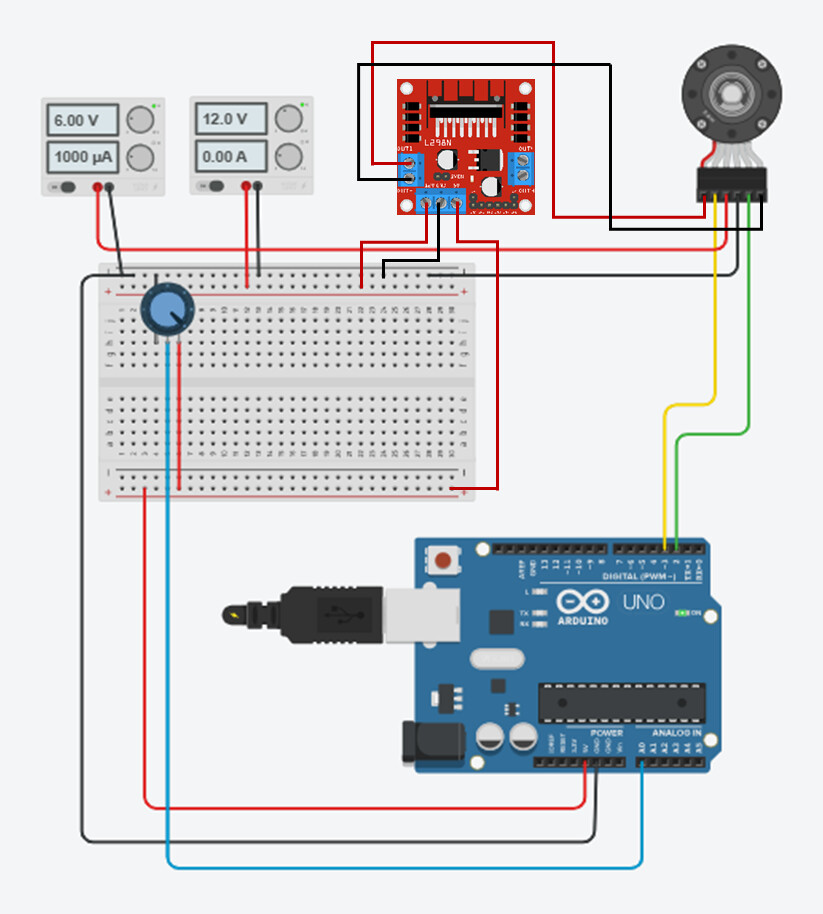
I am using an N20B DC motor with an encoder to measure speed, an L298N motor driver for control, and a potentiometer to adjust the motor speed.
I want to display the voltage and speed curves on the Serial Plotter. The speed will change by adjusting the voltage using a potentiometer, demonstrating a first-order system response. From these curves, I aim to derive the transfer function, such as Kτs+1\frac{K}{\tau s + 1}τs+1K.
Additionally, I would like to know how to determine in the code the motor's encoder pulses per revolution (e.g., encoderPPR = 12) and set the measurement interval (e.g., interval = 100 ms).
I used the code below,
#define ENA 5 // PWM pin for motor speed control
#define IN1 9 // Motor driver IN1
#define IN2 10 // Motor driver IN2
#define ENC_A 2 // Encoder signal A (interrupt pin)
#define ENC_B 3 // Encoder signal B
#define POT A0 // Potentiometer for adjusting voltage
volatile long encoderCount = 0; // Encoder pulse count
float rpm = 0; // Motor speed in RPM
unsigned long lastTime = 0;
const int encoderPPR = 12; // Pulses per revolution of the encoder
const int gearRatio = 150; // Gear ratio of the motor
const int effectivePPR = encoderPPR * gearRatio; // Effective PPR for the output shaft
const int interval = 100; // Time interval for RPM calculation (ms)
// Interrupt service routine for encoder signal
void readEncoder() {
if (digitalRead(ENC_B) == HIGH) {
encoderCount++; // Increment count for forward rotation
} else {
encoderCount--; // Decrement count for reverse rotation
}
}
void setup() {
// Motor driver pins
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
// Encoder pins
pinMode(ENC_A, INPUT_PULLUP);
pinMode(ENC_B, INPUT_PULLUP);
// Attach interrupt for encoder signal
attachInterrupt(digitalPinToInterrupt(ENC_B), readEncoder, RISING);
// Initialize serial communication
Serial.begin(9600); // For Arduino Serial Plotter
}
void loop() {
// Read potentiometer value (0-1023)
int potValue = analogRead(POT);
// Map potentiometer value to PWM (0-255) and calculate input voltage
int pwmValue = map(potValue, 0, 1023, 0, 255);
float inputVoltage = (potValue * 6.0) / 1023.0; // Convert to voltage (assuming 6V reference)
// Apply PWM to motor driver
analogWrite(ENA, pwmValue);
digitalWrite(IN1, HIGH); // Motor forward direction (Encoder rotate clockwise)
digitalWrite(IN2, LOW);
// Calculate RPM
unsigned long currentTime = millis();
if (currentTime - lastTime >= interval) { // Every `interval` ms
rpm = (encoderCount / (float)effectivePPR) * (60000.0 / interval); // Calculate RPM
encoderCount = 0; // Reset encoder count
lastTime = currentTime;
// Plot RPM vs Voltage in Serial Plotter
Serial.print(inputVoltage); // Plot Voltage
Serial.print(",");
Serial.println(rpm); // Plot RPM
}
}