Un simple redémarrage a résolu mon problème. Mais mon programme ne marche pas...
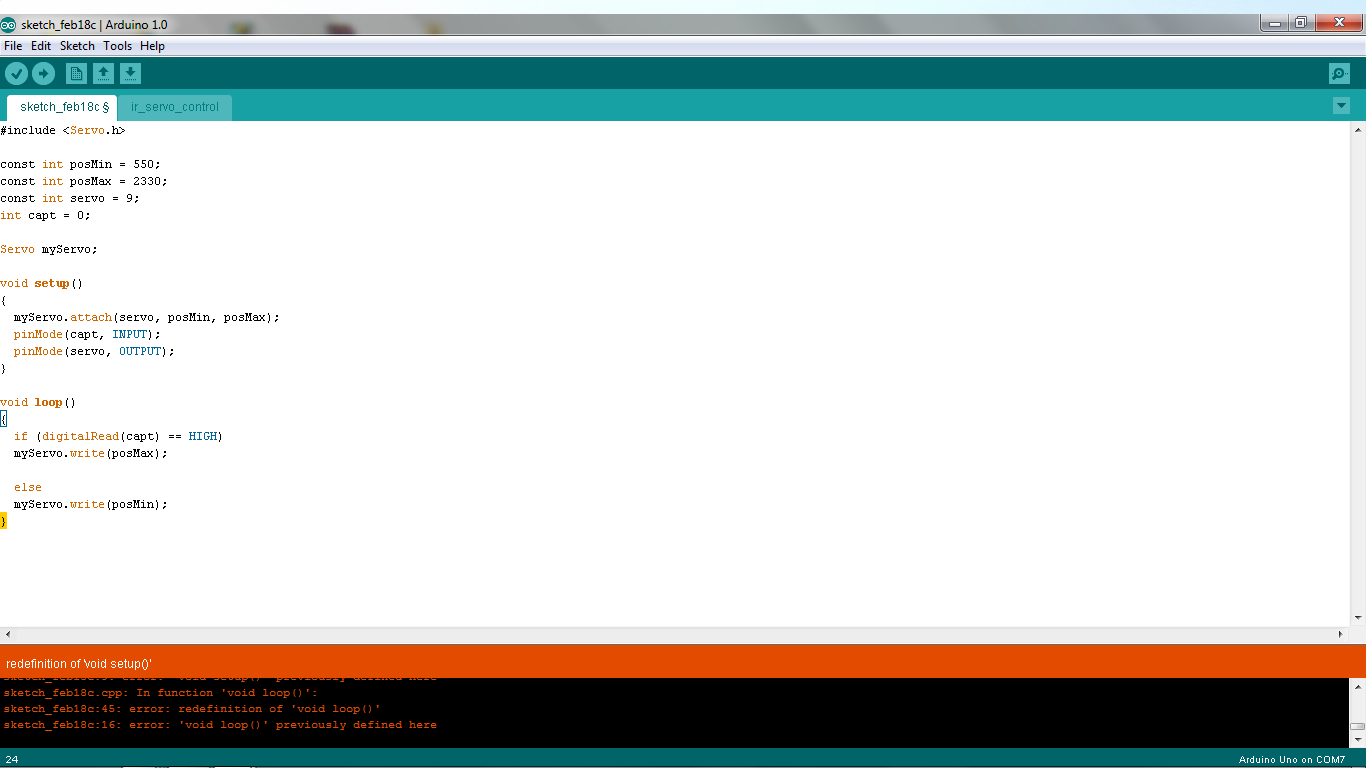
Quelqu'un pourrais m'aider a réaliser le programme suivant:
-Si capteur capte un présence , servomoteur faire un demi-tour.
-Si capteur ne capte rien, servomoteur reste en position initial.
Voici les caractéristiques des mes deux principaux éléments :
Servomoteur :
- Type : TowerPro SG90
- Dimensions : 22 x 11,5 x 27 mm
- Poids : 9g
- Vitesse: 0.12 sec/60° sous 4.8V
- Couple: 1.2Kg/cm sous 4.8V
- Tension: 4.8V - 6V
- Prise type Graupner UNI
capteurIR :
Type: Numérique
Tension d'Alimentation:3?5V
Courant:50?A
Température de fonctionnement:0???70?
Tension de sortie (niveau haut):4V
Tension de sortie (niveau bas)?:0.4V
Angle de détection: 110°
Distance de détection:7 mètres
Dimensions:28mm×36mm
Poids:25g
Je penche dessus depuis ce matin c'est ridicule mais bon je serais noob pour cette fois ;p
(c'est la programmation du capteur qui pose probleme)