Hallo an Alle,
ich bin sehr neu in der Welt von Arduino.
Ich habe ein kleines Musikstudio und mir kam die Idee, dass ich mir für meine Gitarrenbox einen Mikrofonroboter bauen könnte.
Ich habe dann im Internet nach einer Anleitung gesucht und auch eine gefunden.
Der Aufbau ist folgender:
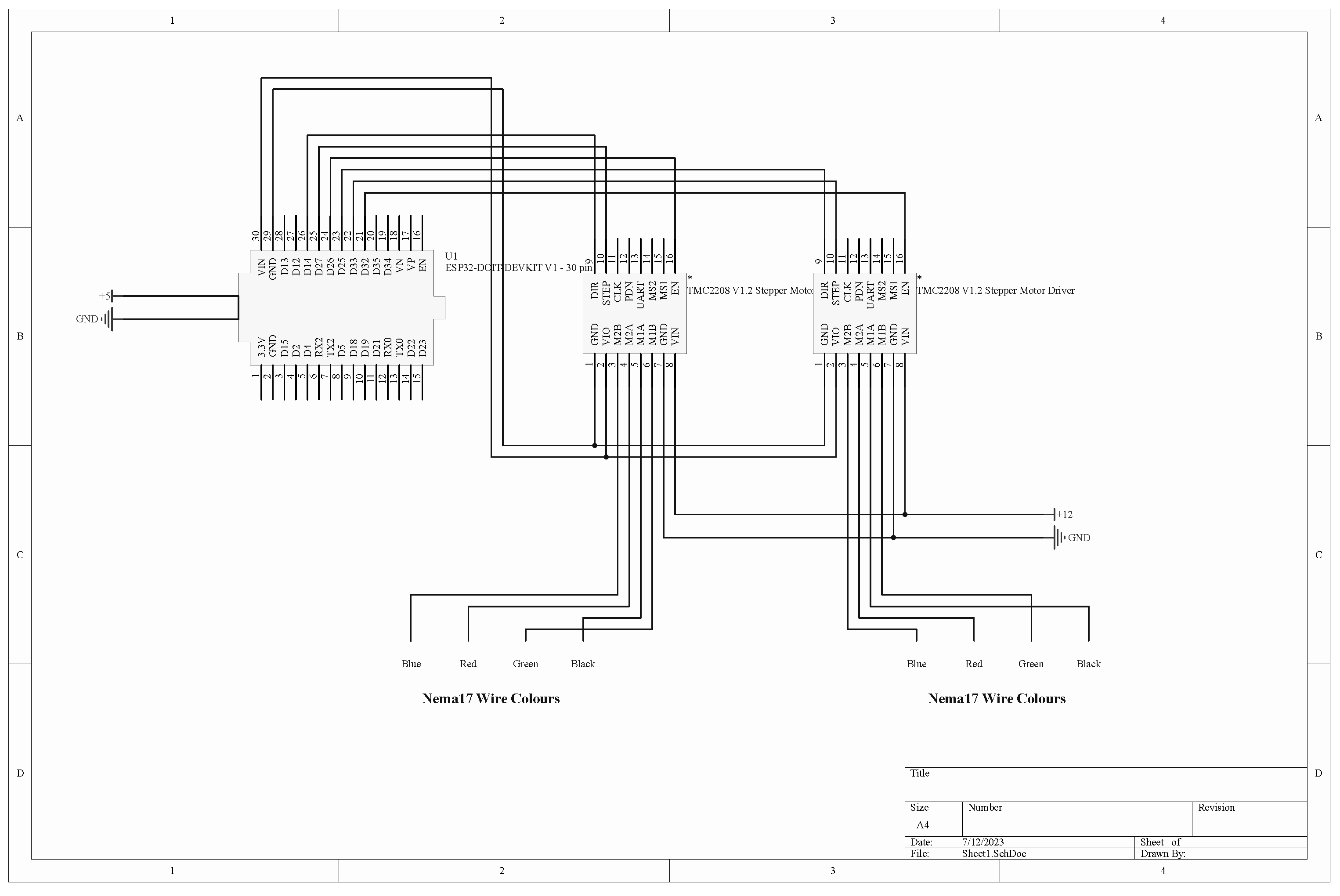
Über einen ESP32 werden zwei TMC2208 angesteuert verbunden mit einem Nema17 Motor.
So könnte ich das Mikrofon auf zwei Aluminiumschienen in der X- sowie Y-Achse verschieben.
Das verschieben auf der x-Achse klappt auch super. Bei der Y-Achse geht es nur nach vorne und wenn ich mein Mikrofon nach hinten verschieben möchte macht mein Nema17 Motor nur ein komisches Geräusch. Wenn ich die Anschlüsse von den Motoren vertausche, dann kann ich ganz normal auf der Y-Achse fahren. Dann tritt das gleiche Probleme aber bei der X-Achse auf. Also konnte ich ausschließen, dass es der Motor ist. Dann dachte ich, es ist der TMC2208, also habe ich diese getauscht, aber das Problem bleibt bestehen, also liegt es auch nicht an den TMC2208. Jetzt bin ich langsam ein wenig Ratlos, was es noch sein könnte.
Der Nema17 wird mit 12vdc versorgt.
Das Projekt habe ich von GitHub und an meine Bedürfnisse angepasst. (IP Adresse für den Webzugriff wurde abgeändert)
Was könnte der Fehler sein?
Wo habe ich einen Denkfehler?
Und genau deswegen brauchen wir exact deinen Sketch den du geflasht hast. Auch ein präzises Schaltbild deines Aufbaus benötigen wir um evtl. Fehler zu erkennen.
Zudem brauchen wir links zu deinen verwendeten Bauteilen.
Hallo Hot System.
Vielen Dank für deine Nachricht.
Das ist der komplette Sketch.
/*********
Matt Conybeare
DIYnamount project code written by MCA using libraries included below.
ESPAsyncWebServer code written by Rui Santos and extended by MCA.
https://www.mcaud.io/
https://github.com/h7-v
https://fosstodon.org/@h7
*********/
/*********
Rui Santos
Complete project details at
https://RandomNerdTutorials.com/esp32-websocket-server-arduino/
https://RandomNerdTutorials.com/esp8266-nodemcu-web-server-websocket-sliders/
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
*********/
// Please see README.md in this repository for more information.
/*
Includes and defines
*/
// Import required libraries
#include <Arduino.h>
#include <WiFi.h>
#include <AsyncTCP.h> // https://github.com/dvarrel/AsyncTCP
#include <WiFiManager.h> // https://github.com/tzapu/WiFiManager
// Fixes for HTTP compiler errors (if needed)
//#define WEBSERVER_H
//#include "WebServer.h"
#include <ESPAsyncWebServer.h> // https://github.com/me-no-dev/ESPAsyncWebServer
#include <SPIFFS.h> // https://github.com/espressif/arduino-esp32/tree/master/libraries/SPIFFS
#include <Arduino_JSON.h> // https://github.com/arduino-libraries/Arduino_JSON
// Breadboard position from left to right: ESP32, TMC2208 (MOTORPOS) for
// speaker position, TMC2208 (MOTORDIST) for speaker distance.
// POS = Microphone horizontal position to front of speaker
// DIST = Microphone distance from front of speaker
// EN = Motor driver enable/disable
// DIR = Motor spin direction clockwise/anticlockwise
// STEP = Step motor step pulse
#define MOTORPOSEN 26 // HIGH turns motor off, LOW turns motor on
#define MOTORDISTEN 32 // HIGH turns motor off, LOW turns motor on
#define MOTORPOSDIR 14
#define MOTORPOSSTEP 27
#define MOTORDISTDIR 25
#define MOTORDISTSTEP 33
// See README.md
#define STEPSPERUNITMOVEMENT 58
#define MOTORSPEED 700
/*
setup() functions and lib init
*/
// Below two lines allow for WiFi connection without WiFi manager
//const char* ssid = "your_network_ssid";
//const char* password = "your_network_pass";
// If WiFi disconnects while in use, LED connection light turns off and
// device restarts
void WiFiStationDisconnected(WiFiEvent_t event, WiFiEventInfo_t info)
{
digitalWrite(2, LOW);
ESP.restart();
}
void initWiFiManager() {
//WiFiManager, Local intialization
//Once its business is done, there is no need to keep it around
WiFiManager wm;
wm.setHttpPort(81);
// WiFi manager is designed to be displayed upon connection to the stand
// network similarly to how is done on hotel networks. This is done by
// running a web server on port 80 that the device can then interface with.
// This is however not possible here as the AsyncWebServer can only run on
// port 80.
// In order to connect to the stand network for WiFi config,
// use a web browser to visit 192.168.4.1:81
// reset settings - wipe stored credentials for testing
// these are stored by the esp library
// Resetting as the device will be moving to different networks often
wm.resetSettings();
// set dark theme
wm.setClass("invert");
// set static ip,gw,sn
wm.setSTAStaticIPConfig(IPAddress(192,168,178,117), // IP address
IPAddress(192,168,178,1), // Gateway
IPAddress(255,255,255,0)); // Subnet mask
// Automatically connect using saved credentials,
// if connection fails, it starts an access point with the specified ssid.
bool res; // used to indicate successful connection
// wm.autoConnect("ssid", "password"); or ignore second parameter for open
// network.
// This method is used to set the ssid and password for connecting to the
// ESP32 for WiFi connection setup to a WiFi network
res = wm.autoConnect("DIYnamount Config");
if(!res) {
Serial.println("Failed to connect");
// ESP.restart(); // or consider restarting manually
}
else {
//if you get here you have connected to the WiFi
Serial.println("connected...yeey :)");
}
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.println("WiFi connected.");
Serial.println("IP address: ");
Serial.println(WiFi.localIP());
// 3 ESP32 LED flashes to indicate successful connection
digitalWrite(2, HIGH);
delay(200);
digitalWrite(2, LOW);
delay(200);
digitalWrite(2, HIGH);
delay(200);
digitalWrite(2, LOW);
delay(200);
digitalWrite(2, HIGH);
}
void initFileSystem() {
if(!SPIFFS.begin()){
Serial.println("An Error has occurred while mounting SPIFFS");
return;
} else {
Serial.println("Mounting SPIFFS successful");
}
}
/*
Physical parts setup
*/
//**************************************************
// Motor setup. You will need to tweak these values according to the size
// or your microphone stand. The below settings apply to TMC2208 motor drivers.
// CAUTION: The following 2 variables were used for testing when the hardware
// did not exist.
// The new value at stepsForDividedTurn is used with the actual hardware.
// Change this to fit the number of motor steps per revolution
// 2048 for ULN2003 motors but not sure about microsteps for TMC2208 -
// TMC2208 supposedly 200 with default settings.
//const int stepsPerRevolution = 200;
// Set the division according to how much the motor should rotate per one
// slider step
//const int stepsForDividedTurn = stepsPerRevolution / 5;
// TWEAK THIS FOR THE LENGTH OF THE ALUMINIUM!
// This value represents the amount of steps the motor should turn for
// a single increase or decrease in value on the web GUI slider
// In this case 5800 steps would move from position 1 to 100. This must be
// adjusted according to the length of your aluminium extrusion.
// This constant also assumes that both position and distance extrusions are
// the same length.
const int stepsForOneSliderMove = STEPSPERUNITMOVEMENT;
// Time spent waiting between step pulses. Lower values rotate the motors
// faster. This constant controls the speed of both motors simultaneously.
const int motorStepDelay = MOTORSPEED;
//**************************************************
// x_pos = Horizontal position to speaker
// y_pos = Distance from speaker
int stand_x_pos_control = 50; // Value retrieved from web server on pos change
int stand_y_pos_control = 100;
int stand_x_pos = 50; // Real microphone position
int stand_y_pos = 100;
// Difference ints to prevent the creation of a new var each cycle of
// controlSteppers()
int x_diff = 0;
int y_diff = 0;
/*
WebServer
*/
// Create AsyncWebServer object on port 80
AsyncWebServer server(80);
AsyncWebSocket ws("/ws");
String message = ""; // message sent by web socket
String sliderValue1 = "50"; // ESP32 tracking of web server slider position
String sliderValue2 = "100";
//Json Variable to Hold Slider Values
JSONVar sliderAndLiveValues;
//Get Slider Values and ACTUAL LIVE VALUES
String getSliderAndLiveValues(){
sliderAndLiveValues["sliderValue1"] = String(sliderValue1);
sliderAndLiveValues["sliderValue2"] = String(sliderValue2);
sliderAndLiveValues["stateposition"] = String(stand_x_pos);
sliderAndLiveValues["statedistance"] = String(stand_y_pos);
String jsonString = JSON.stringify(sliderAndLiveValues);
return jsonString;
}
/*
Page CSS, HTML, Javascript
*/
// All code for the control webpage is found below. CSS file must be uploaded
// via the Arduino IDE Tools->ESP32 Sketch Data Upload or equivalent. CSS file
// be found in the /data directory of this repository. All Javascript is in the
// below HTML in the <script> tag.
// The amount of JS got a bit out of hand and could really be placed in the
// /data dir as well. It turned out to be much easier to edit at the time
// in this file however.
const char index_html[] PROGMEM = R"rawliteral(
<!DOCTYPE HTML><html>
<head>
<title>DIYnamount</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="icon" href="mcalogofavicon">
<link rel="stylesheet" href="mcastylesheet">
</head>
<body>
<div class="topnav">
<img src="mcalogo">
<h2 style="font-size: 1rem; font-weight: bold; font-style: italic; color: #FFFFFF;">Matt Conybeare Audio</h2>
<h1>DIYnamount Control</h1>
<h2 id="stateconnectionstatus" style="color: #FFB121">Connecting to stand server. Please wait...</h2>
</div>
<div class="content">
<div class="card">
<h2>Speaker Position</h2>
<p class="state">Position slider: <span id="sliderValue1"></span></p>
<p class="state">Real mic position: <span id="stateposition">%STATE%</span></p>
<img src="v30speaker" style="object-fit:contain; width:100%%;">
<p class="switch">
<input type="range" id="slidersm57" class="slidersm57" min="0" max="100" step="1" value ="50" disabled>
</p>
<p class="switch">
<input type="range" oninput="updateSliderPWM(this)" id="slider1" min="0" max="100" step="1" value ="50" class="slider">
</p>
<button id="buttonleft" onclick="updateSliderPWMFromButton(this)" class="button" disabled>Move Left (-1)</button>
<button id="buttonright" onclick="updateSliderPWMFromButton(this)" class="button" disabled>Move Right (+1)</button>
</div>
<div class="card">
<h2>Speaker Distance</h2>
<p class="state">Distance slider: <span id="sliderValue2"></span></p>
<p class="state">Real mic distance: <span id="statedistance">%STATE%</span></p>
<p class="switch">
<input type="range" oninput="updateSliderPWM(this)" id="slider2" min="0" max="100" step="1" value ="100" class="slider">
</p>
<button id="buttonfurther" onclick="updateSliderPWMFromButton(this)" class="button" disabled>Move Further (-1)</button>
<button id="buttoncloser" onclick="updateSliderPWMFromButton(this)" class="button" disabled>Move Closer (+1)</button>
</div>
<button id="buttoncalibrate" class="button" disabled>Calibrate Controls</button>
</div>
<script>
var gateway = `ws://${window.location.hostname}/ws`;
var websocket;
window.addEventListener('load', onLoad);
const stateconnectionstatus = document.getElementById('stateconnectionstatus');
let hasConnectedOnceFlag = false;
function initWebSocket() {
console.log('Trying to open a WebSocket connection...');
websocket = new WebSocket(gateway);
websocket.onopen = onOpen;
websocket.onclose = onClose;
websocket.onmessage = onMessage; // <-- add this line
}
function setUIConnected() {
stateconnectionstatus.style.color = '#00FF00'
stateconnectionstatus.textContent = 'Connected';
document.getElementById("buttonleft").disabled = false;
document.getElementById("buttonright").disabled = false;
document.getElementById("buttonfurther").disabled = false;
document.getElementById("buttoncloser").disabled = false;
document.getElementById("buttoncalibrate").disabled = false;
document.getElementById("buttonleft").style.background = '#FFB121';
document.getElementById("buttonright").style.background = '#FFB121';
document.getElementById("buttonfurther").style.background = '#FFB121';
document.getElementById("buttoncloser").style.background = '#FFB121';
document.getElementById("buttoncalibrate").style.background = '#FFB121';
document.getElementById("slider1").disabled = false;
document.getElementById("slider2").disabled = false;
}
function onOpen(event) {
console.log('Connection opened');
setUIConnected();
getValues();
hasConnectedOnceFlag = true;
}
function setUIDisconnected() {
if (hasConnectedOnceFlag) {
stateconnectionstatus.style.color = '#FF0000'
stateconnectionstatus.textContent = 'Connection lost. Attempting to reconnect...';
document.getElementById("buttonleft").disabled = true;
document.getElementById("buttonright").disabled = true;
document.getElementById("buttonfurther").disabled = true;
document.getElementById("buttoncloser").disabled = true;
document.getElementById("buttoncalibrate").disabled = true;
document.getElementById("buttonleft").style.background = '#666666';
document.getElementById("buttonright").style.background = '#666666';
document.getElementById("buttonfurther").style.background = '#666666';
document.getElementById("buttoncloser").style.background = '#666666';
document.getElementById("buttoncalibrate").style.background = '#666666';
document.getElementById("slider1").disabled = true;
document.getElementById("slider2").disabled = true;
}
}
function onClose(event) {
console.log('Connection closed');
stateconnectionstatus.style.color = '#FF0000'
stateconnectionstatus.textContent = 'Connection lost. Attempting to reconnect...';
document.getElementById("buttonleft").disabled = true;
document.getElementById("buttonright").disabled = true;
document.getElementById("buttonfurther").disabled = true;
document.getElementById("buttoncloser").disabled = true;
document.getElementById("buttoncalibrate").disabled = true;
document.getElementById("buttonleft").style.background = '#666666';
document.getElementById("buttonright").style.background = '#666666';
document.getElementById("buttonfurther").style.background = '#666666';
document.getElementById("buttoncloser").style.background = '#666666';
document.getElementById("buttoncalibrate").style.background = '#666666';
document.getElementById("slider1").disabled = true;
document.getElementById("slider2").disabled = true;
setTimeout(initWebSocket, 2000);
}
function updateSliderPWM(element) {
var sliderNumber = element.id.charAt(element.id.length-1);
var sliderValue = document.getElementById(element.id).value;
document.getElementById("sliderValue"+sliderNumber).innerHTML = sliderValue;
// console.log("updateSliderPWM val:" + sliderValue);
websocket.send(sliderNumber+"s"+sliderValue.toString());
}
function updateSliderPWMFromButton(element) {
var buttonName = element.id;
switch(buttonName) {
case "buttonleft":
var sliderValue = document.getElementById('slider1').value;
if (sliderValue != 0) {
sliderValue--;
websocket.send(1+"s"+sliderValue.toString());
break;
} else {
break;
}
case "buttonright":
var sliderValue = document.getElementById('slider1').value;
if (sliderValue != 100) {
sliderValue++;
websocket.send(1+"s"+sliderValue.toString());
break;
} else {
break;
}
case "buttonfurther":
var sliderValue = document.getElementById('slider2').value;
if (sliderValue != 0) {
sliderValue--;
websocket.send(2+"s"+sliderValue.toString());
break;
} else {
break;
}
case "buttoncloser":
var sliderValue = document.getElementById('slider2').value;
if (sliderValue != 100) {
sliderValue++;
websocket.send(2+"s"+sliderValue.toString());
break;
} else {
break;
}
default:
console.log("updateSliderPWMFromButton() case condition not met");
}
}
function connectionLost() {
if (hasConnectedOnceFlag) {
setUIDisconnected();
}
}
var connectionTimeout = setTimeout(connectionLost, 10000);
function onMessage(event) {
// console.log(event.data);
setUIConnected();
clearTimeout(connectionTimeout);
connectionTimeout = setTimeout(connectionLost, 10000);
var myObj = JSON.parse(event.data);
var keys = Object.keys(myObj);
for (var i = 0; i < 2; i++){ // this 2 was keys.length before I added two additional object keys which are handled below this loop
var key = keys[i];
document.getElementById(key).innerHTML = myObj[key];
document.getElementById("slider"+ (i+1).toString()).value = myObj[key];
}
var stateposition_key = keys[2];
var statedistance_key = keys[3];
document.getElementById('stateposition').innerHTML = myObj[stateposition_key];
document.getElementById('statedistance').innerHTML = myObj[statedistance_key];
document.getElementById('slidersm57').value = myObj[stateposition_key];
}
function onLoad(event) {
initWebSocket();
initButtons();
}
function initButtons() {
document.getElementById('buttonleft').addEventListener('click', moveleftclick);
document.getElementById('buttonright').addEventListener('click', moverightclick);
document.getElementById('buttonfurther').addEventListener('click', movefurtherclick);
document.getElementById('buttoncloser').addEventListener('click', movecloserclick);
document.getElementById('buttoncalibrate').addEventListener('click', calibrateclick);
}
function moveleftclick(){
websocket.send('moveleft');
}
function moverightclick(){
websocket.send('moveright');
}
function movefurtherclick(){
websocket.send('movefurther');
}
function movecloserclick(){
websocket.send('movecloser');
}
function calibrateclick(){
websocket.send('calibrate');
}
function getValues(){
if (hasConnectedOnceFlag) {
console.log("getValues() called");
try {
websocket.send('getValues');
}
catch(err) {
setUIDisconnected();
}
}
}
const interval = setInterval(getValues, 2000);
</script>
</body>
</html>
)rawliteral";
/*
WebSocket response functions
*/
void notifyClients(String sliderAndLiveValues) {
Serial.println("Slider values from notifyClients: ");
Serial.println(sliderAndLiveValues);
ws.textAll(sliderAndLiveValues);
}
void handleWebSocketMessage(void *arg, uint8_t *data, size_t len) {
AwsFrameInfo *info = (AwsFrameInfo*)arg;
if (info->final && info->index == 0 && info->len == len && info->opcode == WS_TEXT) {
data[len] = 0;
message = (char*)data;
if (message.indexOf("1s") >= 0) {
sliderValue1 = message.substring(2);
stand_x_pos_control = sliderValue1.toInt();
Serial.print(getSliderAndLiveValues());
notifyClients(getSliderAndLiveValues());
}
if (message.indexOf("2s") >= 0) {
sliderValue2 = message.substring(2);
stand_y_pos_control = sliderValue2.toInt();
Serial.print(getSliderAndLiveValues());
notifyClients(getSliderAndLiveValues());
}
if (strcmp((char*)data, "getValues") == 0) {
notifyClients(getSliderAndLiveValues());
}
if (strcmp((char*)data, "calibrate") == 0) {
stand_x_pos_control = 50;
stand_y_pos_control = 100;
stand_x_pos = 50;
stand_y_pos = 100;
sliderValue1 = "50";
sliderValue2 = "100";
notifyClients(getSliderAndLiveValues());
}
}
}
void onEvent(AsyncWebSocket *server, AsyncWebSocketClient *client, AwsEventType type,
void *arg, uint8_t *data, size_t len) {
switch (type) {
case WS_EVT_CONNECT:
Serial.printf("WebSocket client #%u connected from %s\n", client->id(), client->remoteIP().toString().c_str());
break;
case WS_EVT_DISCONNECT:
Serial.printf("WebSocket client #%u disconnected\n", client->id());
break;
case WS_EVT_DATA:
handleWebSocketMessage(arg, data, len);
break;
case WS_EVT_PONG:
case WS_EVT_ERROR:
break;
}
}
/*
WebSocket init
*/
void initWebSocket() {
ws.onEvent(onEvent);
server.addHandler(&ws);
Serial.printf("WebSocket initiated.");
}
String processor(const String& var){
Serial.println(var);
// There's no real reason to have this code run with all the other update functions running
// if(var == "STATE"){
// String str_stand_x_pos = String(stand_x_pos);
// return str_stand_x_pos;
// }
return String();
}
/*
setup()
*/
void setup(){
// Serial port for debugging purposes
Serial.begin(115200);
pinMode(2, OUTPUT); // set the LED pin mode
// Set pin modes for motor control pins
pinMode(MOTORPOSEN, OUTPUT);
pinMode(MOTORDISTEN, OUTPUT);
pinMode(MOTORPOSDIR, OUTPUT);
pinMode(MOTORPOSSTEP, OUTPUT);
pinMode(MOTORDISTDIR, OUTPUT);
pinMode(MOTORDISTSTEP, OUTPUT);
// Motor Setup
// Disable motors so that current is not drawn when not in use
digitalWrite(MOTORPOSEN, HIGH);
digitalWrite(MOTORDISTEN, HIGH);
// WiFi setup
WiFi.onEvent(WiFiStationDisconnected, WiFiEvent_t::ARDUINO_EVENT_WIFI_STA_DISCONNECTED);
initWiFiManager();
initFileSystem();
initWebSocket();
// Below files found in the /data directory of this repository
// Route for root / web page
server.on("/", HTTP_GET, [](AsyncWebServerRequest *request){
request->send_P(200, "text/html", index_html, processor);
});
// Route for MCA Logo favicon png file
server.on("/mcalogofavicon", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/mcafavicon.png", "image/png");
});
// Route for CSS file
server.on("/mcastylesheet", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/mcastylesheet.css", "text/css");
});
// Route for MCA Logo png file
server.on("/mcalogo", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/smallmcalogowithwhitespace.png", "image/png");
});
// Route for Celestion v30 png file
server.on("/v30speaker", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/vintage30.png", "image/png");
});
// Route for sm57 png file
server.on("/sm57", HTTP_GET, [](AsyncWebServerRequest *request){
request->send(SPIFFS, "/sm57transcrop.png", "image/png");
});
// Start web server
server.begin();
}
/*
loop() functions
*/
// Motor direction (false is clockwise, true is anticlockwise) and number of steps
void spinMotor1(const bool &dir, const int &amt) {
digitalWrite(MOTORPOSEN, LOW); // Enable motor
delayMicroseconds(motorStepDelay);
if (dir == false) { // Set direction
digitalWrite(MOTORPOSDIR, HIGH);
} else if (dir == true) {
digitalWrite(MOTORPOSDIR, LOW);
}
delayMicroseconds(motorStepDelay);
for (int i = 0; i < amt; i++) { // Turn motor
digitalWrite(MOTORPOSSTEP, HIGH);
delayMicroseconds(motorStepDelay);
digitalWrite(MOTORPOSSTEP, LOW);
delayMicroseconds(motorStepDelay);
}
digitalWrite(MOTORPOSEN, HIGH); // Disable motor when work is done
}
// Motor direction (true is clockwise, false is anticlockwise) and number of steps
void spinMotor2(const bool &dir, const int &amt) {
digitalWrite(MOTORDISTEN, LOW); // Enable motor
delayMicroseconds(motorStepDelay);
if (dir == false) { // Set direction
digitalWrite(MOTORDISTDIR, HIGH);
} else if (dir == true) {
digitalWrite(MOTORDISTDIR, LOW);
}
delayMicroseconds(motorStepDelay);
for (int i = 0; i < amt; i++) { // Turn motor
digitalWrite(MOTORDISTSTEP, HIGH);
delayMicroseconds(motorStepDelay);
digitalWrite(MOTORDISTSTEP, LOW);
delayMicroseconds(motorStepDelay);
}
digitalWrite(MOTORDISTEN, HIGH); // Disable motor when work is done
}
void controlSteppers() {
// If the real position is not the same as the GUI control
if (stand_x_pos != stand_x_pos_control) {
if (stand_x_pos > stand_x_pos_control) {
// Calc the difference between the real position and control
x_diff = stand_x_pos - stand_x_pos_control;
// Turn the motor to bring the real pos to the GUI control
spinMotor1(false, (x_diff * stepsForOneSliderMove));
// Update the real position
stand_x_pos = stand_x_pos - x_diff;
}
if (stand_x_pos < stand_x_pos_control) {
x_diff = stand_x_pos_control - stand_x_pos;
spinMotor1(true, (x_diff * stepsForOneSliderMove));
stand_x_pos = stand_x_pos + x_diff;
}
}
if (stand_y_pos != stand_y_pos_control) {
if (stand_y_pos > stand_y_pos_control) {
y_diff = stand_y_pos - stand_y_pos_control;
spinMotor2(true, (y_diff * stepsForOneSliderMove));
stand_y_pos = stand_y_pos - y_diff;
}
if (stand_y_pos < stand_y_pos_control) {
y_diff = stand_y_pos_control - stand_y_pos;
spinMotor2(false, (y_diff * stepsForOneSliderMove));
stand_y_pos = stand_y_pos + y_diff;
}
}
}
/*
loop()
*/
void loop() {
//Web server housekeeping
ws.cleanupClients();
//Physical stepper motor response to value changes from sliders and buttons
controlSteppers();
}
Der Schaltplan den ich verwendet habe sieht so aus.
Das einzige, was ich bei meinem Sketch geändert habe ist die IP Adresse und die Gateway Adresse. Ich kann auch auf dem Webbasierten Controller zugreifen.
Ok, danke für die ausführlichen Informationen.
Den Sketch muss man sich genauer ansehen um den Fehler zu lokalisieren.
Da mir was Stepper betrifft, die Erfahrung fehlt, sollte besser noch jemand anderes drüber schauen.
habe mir mal die Mühe gemacht, alles aus dem Sketch zu löschen, das nichts mit der Stepperansteuerung zu tun hat und die Eingabe der Steuerstrings per Serial zu ermöglichen und das Ganze hier eingestellt:
Eingabemöglichkeit Serial:
"calibrate"
Setzt sliderValue1 = "50" und sliderValue2 = "100"
"getValues"
Gibt die Inhalte der beiden o.a. Strings über die Serielle Schnittstelle aus
"1sX" mit X = 0 bis 100
Setzt sliderValue1 auf den Wert X
"2sX" mit X = 0 bis 100
Setzt sliderValue2 auf den Wert X
Danach sollte die Ansteuerung der Stepper den Eingaben entsprechend funktionieren ...
Das Setzen der relevanten Variablen habe ich (hoffentlich) nicht angefasst:
Der komplette Testsketch, nicht schön, aber schnell erstellt ...
/*
Wokwi: https://wokwi.com/projects/416080727447694337
Forum: https://forum.arduino.cc/t/probleme-mit-meinem-mikrofon-roboter-esp32/1327686/3
Auf die Auswertung der Eingabestrings und die Stepperansteuerung abgespeckte Version
Eingabemöglichkeit Serial:
"calibrate"
Setzt sliderValue1 = "50" und sliderValue2 = "100"
"getValues"
Gibt die Inhalte der beiden o.a. Strings über die Serielle Schnittstelle aus
"1sX" mit X = 0 bis 100
Setzt sliderValue1 auf den Wert X
"2sX" mit X = 0 bis 100
Setzt sliderValue2 auf den Wert X
*/
// Import required libraries
#include <Arduino.h>
// Breadboard position from left to right: ESP32, TMC2208 (MOTORPOS) for
// speaker position, TMC2208 (MOTORDIST) for speaker distance.
// POS = Microphone horizontal position to front of speaker
// DIST = Microphone distance from front of speaker
// EN = Motor driver enable/disable
// DIR = Motor spin direction clockwise/anticlockwise
// STEP = Step motor step pulse
#define MOTORPOSEN 26 // HIGH turns motor off, LOW turns motor on
#define MOTORDISTEN 32 // HIGH turns motor off, LOW turns motor on
#define MOTORPOSDIR 14
#define MOTORPOSSTEP 27
#define MOTORDISTDIR 25
#define MOTORDISTSTEP 33
// See README.md
#define STEPSPERUNITMOVEMENT 58
#define MOTORSPEED 700
/*
Physical parts setup
*/
//**************************************************
// Motor setup. You will need to tweak these values according to the size
// or your microphone stand. The below settings apply to TMC2208 motor drivers.
// CAUTION: The following 2 variables were used for testing when the hardware
// did not exist.
// The new value at stepsForDividedTurn is used with the actual hardware.
// Change this to fit the number of motor steps per revolution
// 2048 for ULN2003 motors but not sure about microsteps for TMC2208 -
// TMC2208 supposedly 200 with default settings.
//const int stepsPerRevolution = 200;
// Set the division according to how much the motor should rotate per one
// slider step
//const int stepsForDividedTurn = stepsPerRevolution / 5;
// TWEAK THIS FOR THE LENGTH OF THE ALUMINIUM!
// This value represents the amount of steps the motor should turn for
// a single increase or decrease in value on the web GUI slider
// In this case 5800 steps would move from position 1 to 100. This must be
// adjusted according to the length of your aluminium extrusion.
// This constant also assumes that both position and distance extrusions are
// the same length.
const int stepsForOneSliderMove = STEPSPERUNITMOVEMENT;
// Time spent waiting between step pulses. Lower values rotate the motors
// faster. This constant controls the speed of both motors simultaneously.
const int motorStepDelay = MOTORSPEED;
//**************************************************
// x_pos = Horizontal position to speaker
// y_pos = Distance from speaker
int stand_x_pos_control = 50; // Value retrieved from web server on pos change
int stand_y_pos_control = 100;
int stand_x_pos = 50; // Real microphone position
int stand_y_pos = 100;
// Difference ints to prevent the creation of a new var each cycle of
// controlSteppers()
int x_diff = 0;
int y_diff = 0;
/*
WebServer
*/
String sliderValue1 = "50"; // ESP32 tracking of web server slider position
String sliderValue2 = "100";
void checkSerialInput() {
static String message = "";
if (Serial.available()) {
char c = Serial.read();
if (c < ' ') {
simulateWebSocketMessage(message);
message = "";
} else {
message += c;
}
}
}
void notifyClients(String text) {
Serial.println(text);
}
String getSliderAndLiveValues() {
return sliderValue1 + ", " + sliderValue2;
}
void simulateWebSocketMessage(String message) {
if (message.indexOf("1s") >= 0) {
sliderValue1 = message.substring(2);
stand_x_pos_control = sliderValue1.toInt();
notifyClients(getSliderAndLiveValues());
}
if (message.indexOf("2s") >= 0) {
sliderValue2 = message.substring(2);
stand_y_pos_control = sliderValue2.toInt();
notifyClients(getSliderAndLiveValues());
}
if (message.indexOf("getValues") >= 0) {
notifyClients(getSliderAndLiveValues());
}
if (message.indexOf("calibrate") >= 0) {
stand_x_pos_control = 50;
stand_y_pos_control = 100;
stand_x_pos = 50;
stand_y_pos = 100;
sliderValue1 = "50";
sliderValue2 = "100";
notifyClients(getSliderAndLiveValues());
}
}
/*
setup()
*/
void setup() {
// Serial port for debugging purposes
Serial.begin(115200);
Serial.println("Start");
pinMode(2, OUTPUT); // set the LED pin mode
// Set pin modes for motor control pins
pinMode(MOTORPOSEN, OUTPUT);
pinMode(MOTORDISTEN, OUTPUT);
pinMode(MOTORPOSDIR, OUTPUT);
pinMode(MOTORPOSSTEP, OUTPUT);
pinMode(MOTORDISTDIR, OUTPUT);
pinMode(MOTORDISTSTEP, OUTPUT);
// Motor Setup
// Disable motors so that current is not drawn when not in use
digitalWrite(MOTORPOSEN, HIGH);
digitalWrite(MOTORDISTEN, HIGH);
Serial.println("Enter loop");
}
/*
loop() functions
*/
// Motor direction (false is clockwise, true is anticlockwise) and number of steps
void spinMotor1(const bool &dir, const int &amt) {
digitalWrite(MOTORPOSEN, LOW); // Enable motor
delayMicroseconds(motorStepDelay);
if (dir == false) { // Set direction
digitalWrite(MOTORPOSDIR, HIGH);
} else if (dir == true) {
digitalWrite(MOTORPOSDIR, LOW);
}
delayMicroseconds(motorStepDelay);
for (int i = 0; i < amt; i++) { // Turn motor
digitalWrite(MOTORPOSSTEP, HIGH);
delayMicroseconds(motorStepDelay);
digitalWrite(MOTORPOSSTEP, LOW);
delayMicroseconds(motorStepDelay);
}
digitalWrite(MOTORPOSEN, HIGH); // Disable motor when work is done
}
// Motor direction (true is clockwise, false is anticlockwise) and number of steps
void spinMotor2(const bool &dir, const int &amt) {
digitalWrite(MOTORDISTEN, LOW); // Enable motor
delayMicroseconds(motorStepDelay);
if (dir == false) { // Set direction
digitalWrite(MOTORDISTDIR, HIGH);
} else if (dir == true) {
digitalWrite(MOTORDISTDIR, LOW);
}
delayMicroseconds(motorStepDelay);
for (int i = 0; i < amt; i++) { // Turn motor
digitalWrite(MOTORDISTSTEP, HIGH);
delayMicroseconds(motorStepDelay);
digitalWrite(MOTORDISTSTEP, LOW);
delayMicroseconds(motorStepDelay);
}
digitalWrite(MOTORDISTEN, HIGH); // Disable motor when work is done
}
void controlSteppers() {
// If the real position is not the same as the GUI control
if (stand_x_pos != stand_x_pos_control) {
if (stand_x_pos > stand_x_pos_control) {
// Calc the difference between the real position and control
x_diff = stand_x_pos - stand_x_pos_control;
// Turn the motor to bring the real pos to the GUI control
spinMotor1(false, (x_diff * stepsForOneSliderMove));
// Update the real position
stand_x_pos = stand_x_pos - x_diff;
}
if (stand_x_pos < stand_x_pos_control) {
x_diff = stand_x_pos_control - stand_x_pos;
spinMotor1(true, (x_diff * stepsForOneSliderMove));
stand_x_pos = stand_x_pos + x_diff;
}
}
if (stand_y_pos != stand_y_pos_control) {
if (stand_y_pos > stand_y_pos_control) {
y_diff = stand_y_pos - stand_y_pos_control;
spinMotor2(true, (y_diff * stepsForOneSliderMove));
stand_y_pos = stand_y_pos - y_diff;
}
if (stand_y_pos < stand_y_pos_control) {
y_diff = stand_y_pos_control - stand_y_pos;
spinMotor2(false, (y_diff * stepsForOneSliderMove));
stand_y_pos = stand_y_pos + y_diff;
}
}
}
/*
loop()
*/
void loop() {
checkSerialInput();
//Physical stepper motor response to value changes from sliders and buttons
controlSteppers();
}
der Testsketch, den ich auf Wokwi und in meinem vorherigen Post hinterlegt habe, sollte mit der Originalhardware laufen ... Du könntest damit Deine Anwendung über die serielle Schnittstelle testen und so ggf. Hardware-Probleme ausschließen.
Mit dem A4988 Stepper Driver wird die Sache sehr einfach, da man sich um das Schritttiming nicht kümmern muss, das übernimmt der Driver (nur noch Drehrichtung setzen und die Einzelsteps ansteuern).
Danke, das ist mir auch bewusst.
Und einige deiner Aufstellung sind mir wohl bekannt.
Nur mangels Zeit und entsprechender nutzbarer Projekte bin ich da noch nicht voran gekommen. Wird wohl auch noch ein wenig dauern.
Ich werde dein Sketch probieren, wenn ich wieder in meinem Studio bin.
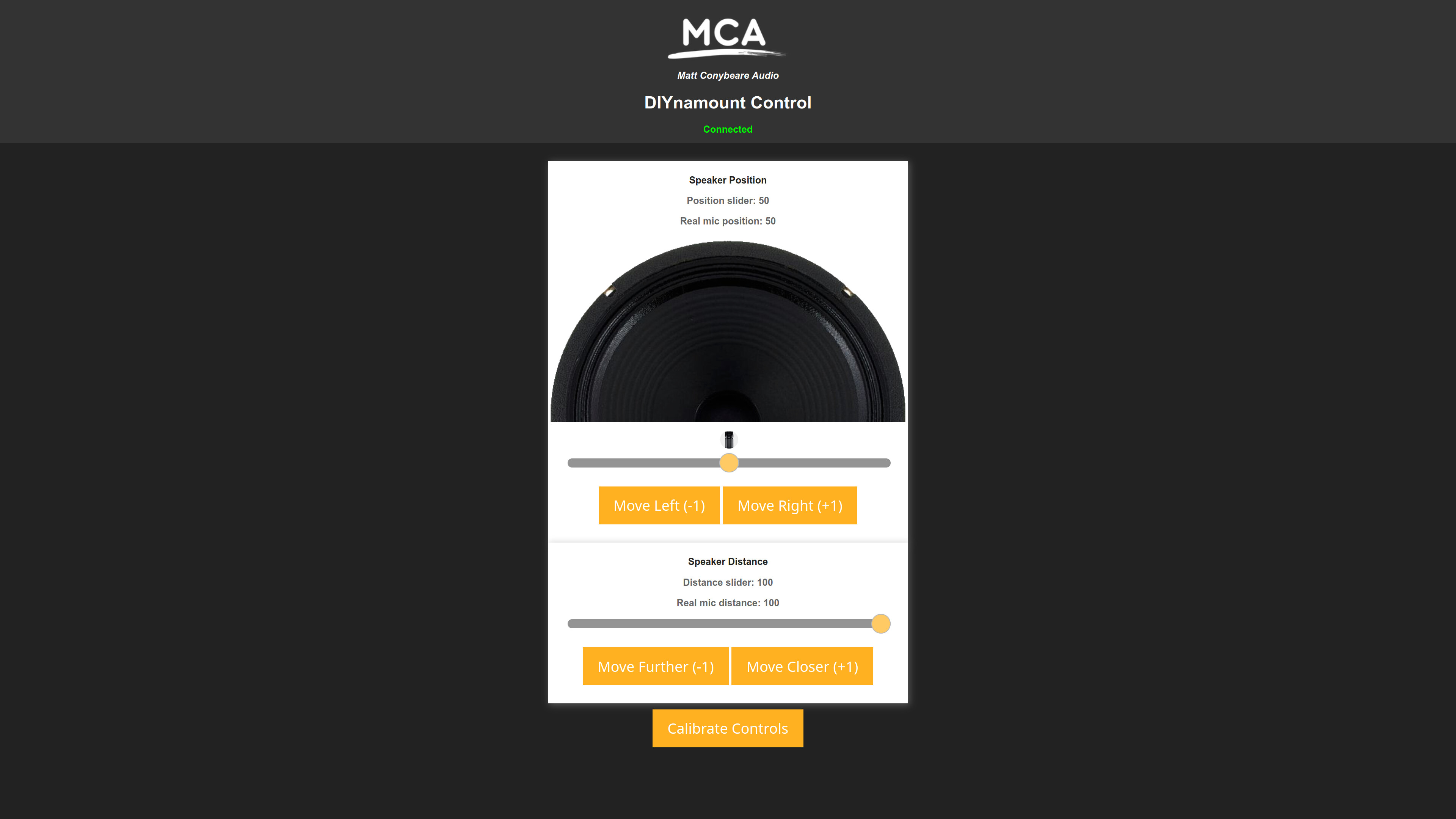
Ich müsste dann trotzdem noch Sachen von meinem alten Sketch einarbeiten, da ich ja den Mikrofonroboter über mein Handy/Webbrowser nutzen möchte.
So kann ich ihn von meinem Kontrollraum aus steuern.
Das Interface sieht so hier aus.
Der Sketch ist nur zu Testzwecken gedacht. Durch das Zerlegen in einzelne Funktionen lässt sich die Fehlerursache nach und nach eingrenzen.
Wenn es mit der seriellen Ansteuerung läuft, kann man sich auf die Webansteuerung konzentrieren. Wenn die einzelnen Funktionen i.O. sind, integriert man sie einzeln nach einander, wenn dann ein Fehler auftritt, liegt es am Zusammenspiel mit dem zuletzt integrierten Teil.
Zwei einfache Regeln:
Vom Bekannten zum Unbekannten
Vom Einfachen zum Komplexen
führen zum Erfolg ...
Wenn Du den ESP32 mit der Software bespielst, verwendest Du vermutlich die Arduino IDE, korrekt? Mit dem dort eingebauten "Serial Monitor" kann man - solange der ESP32 noch am USB hängt - Daten aus- und eingeben ...
Vielen Dank !
Sobald ich wieder im Studio bin probiere ich es aus.
Da ich schon die Motoren sowie die TMC2208 getauscht habe, kann es nur am Sketch liegen oder halt am ESP32, was ich aber eigentlich für unwahrscheinlich halte.
Ich denke, dass ich die Woche mal schauen kann und dann melde ich mich nochmal.
Ja, ich nutze die Arduino IDE.
Ich werde die Ansteuerung finden und wenn nicht, dann hilft mir Google, YouTube oder das Forum hier.
Ich habe mir die zip-Datei von GitHub geholt, ein paar Pins geändert, Programm und data eingespielt, die Anmeldedaten eingegeben und sehe den Lautsprecher mit den Slidern. Bewege ich einen Slider, bewegt sich der Motor.
Nur komische Geräusche höre ich keine.
Mein DRV8825 wird eigentlich gleich zum TMC2208 angesteuert, aber es gibt da auch UART und dergleichen.
Ich würde Dir gerne helfen, nur weiß ich nicht, wie ich das anstellen soll
@agmue
Vielen Dank !
Hast du es auch gebaut ?
Aber es ist wirklich eine Idee vielleicht nochmal die Pinbelegung zu ändern, vielleicht ist wirklich was mit meinem ESP32, weil ich an sich auch denke, dass der Sketch von GitHub ziemlich fehlerfrei sein sollte.
Mit Steckbrett auf meinem Schreibtisch. Ich habe kein Tonstudio, weshalb mir die Mikrofonverstellung vor einem Lautsprecher bis zu Deinem Thema unbekannt war. Hier paßt es mal wieder, ich helfe um zu lernen