Hi, I spent two days searching for solution but no success at all. I´m trying to control brushless motor by esc, I simply want to read signal from receiver and write same signal to flight controller..I will manipulate it later. I tried to measure pwm signal by pulseIn and by interrupt too and use analogwrite to send it back to esc. After many experiments i started to doubt if signal really is pwm so I tried logic analyzer, look at printscreen. If somebody can tell what type of signal it is on channel 1 and whats going on with motor showed on video.
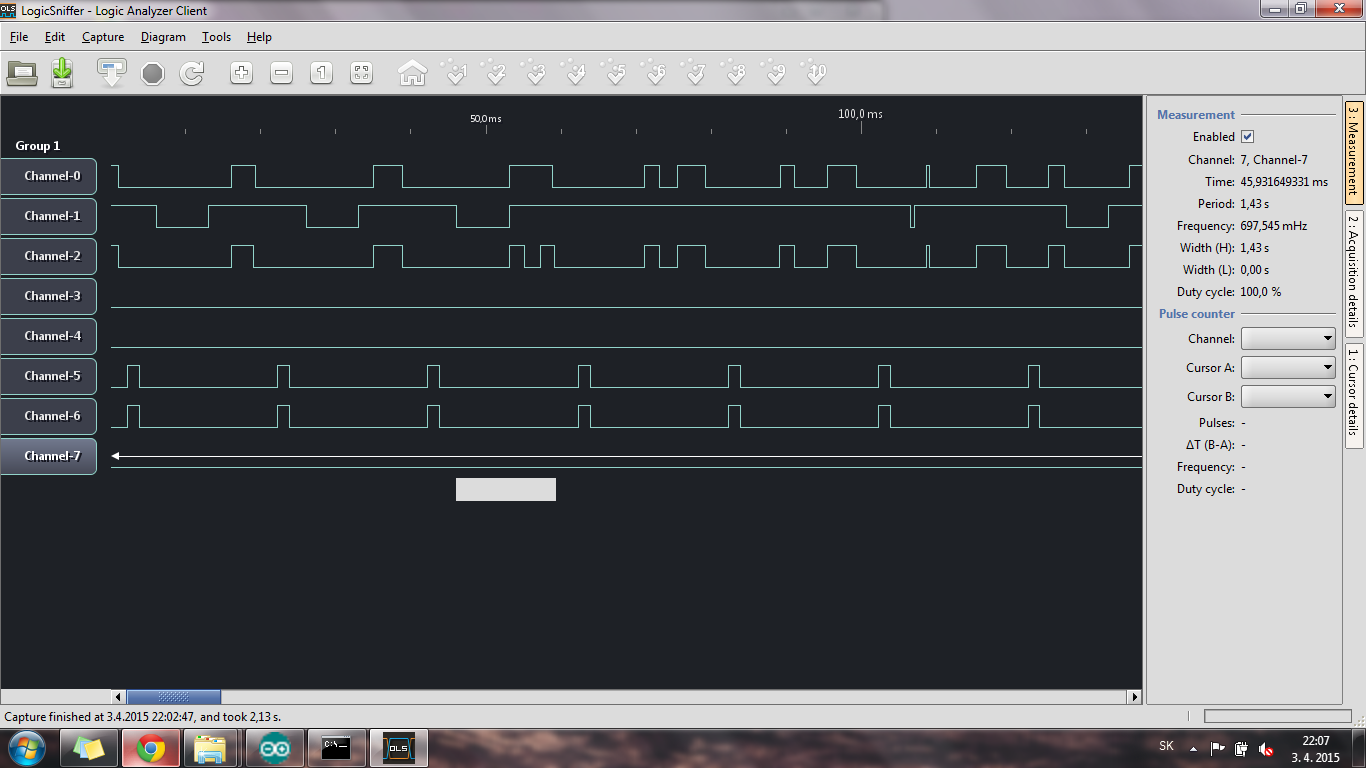
Channels 5 and 6 are the only valid servo signals in that trace. Video doesn't work for me.
Do you have documentation for your receiver and flight controller? What does it say about the signal between them?
Use the servo library, not analogWrite().
analogWrite() produces constant-width pulses for all values except 0 and 255. This will not drive a servo or an ESC which expects a servo input.
Thanks for answers guys. I forget to mention that i tried servo library but still nothing. Believe me I go through lot of examples. I use frsky d8II-plus, manual on page is not helping very much. Is it possible that esc are reading ppm signal instead of pwm? On video you will see how motor work, its constantly arming disarming and working for a while.
MorganS:
Use the servo library
..... but mind your fingers 8)
Is it possible that esc are reading ppm signal instead of pwm?
Most ESCs made for RC use probably use the same control signals that are used by servos.
Hi,
Can you please post a copy of your circuit, in CAD or a picture of a hand drawn circuit in jpg, png or pdf?
Can you please post a copy of your sketch, using code tags?
Please use code tags.. See section 7 http://forum.arduino.cc/index.php/topic,148850.0.html
Tom...... ![]()
Use writeMilliseconds(num) function which comes under the inbuilt servo library the argument num can vary 1000-2000 which is spliced into two divisions where 1500 is the neutral signal to your BLDC motor i assume that you have armed the BLDC motor before using the function