Hi everyone,
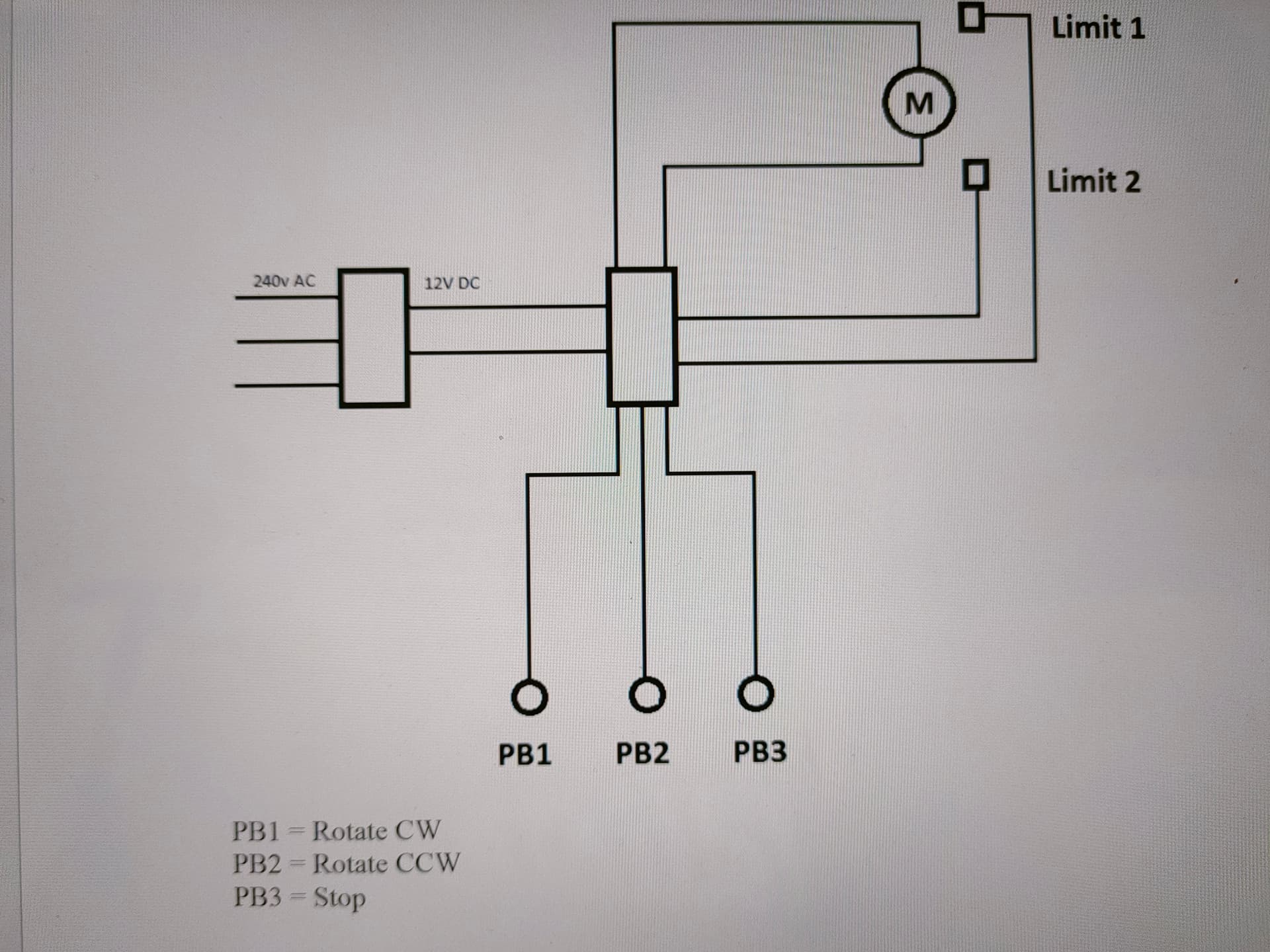
I am currently trying to program a servo motor to rotate clockwise, counter clockwise and stop when it hits a limit switch. I have got it to rotate clockwise and counter clockwise but cannot figure out how to stop it when it hits the limit switch. I also have to program a stop button but can only seem to get the servo to stop at 58 rather than stop it in its current position. I have attached my code below.
Any help would be much appreciated.
Thanks
CODE:
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int servoPin = 9;// this pin must be of those with PWM ~
#define STOPpin 3 // push button pin for STOP
#define CWpin 2 // push button for CW
#define CCWpin 4 // push button for CCW
int sc[]={180, 58, 0};// servo commands are in order
//CCW, STOP,CW
String scText[]={"CCW","Stop","CW"};// define texts for 3 action
int statusText;
int CWBS, CCWBS, SBS;
//CW button status (CWBS)
//CCW button status (CCWBS)
//stop button status (SBS)
void setup() {
Serial.begin(9600);
pinMode(STOPpin,INPUT_PULLUP);// set pin for push button STOP
pinMode(CCWpin,INPUT_PULLUP);// set pin for push button CCW
pinMode(CWpin,INPUT_PULLUP);// set pin for push button CW
myservo.attach(servoPin); // attaches the servo on pin 9 to the servo object
myservo.write(sc[1]);// send STOP command
statusText=1;// initial value is STOP
}
void loop() {
CCWBS = digitalRead(CCWpin);// read status of button CCW
SBS = digitalRead(STOPpin);// read status of button STOP
CWBS = digitalRead(CWpin);// read status of button CW
if(CCWBS ==LOW)
{
servoCommand(0);
}else if(SBS ==LOW)
{
servoCommand(1);
}else if(CWBS ==LOW)
{
servoCommand(2);
}
Serial.println(scText[statusText]);
delay(50);
}// loop
void servoCommand(int n)
{
statusText = n;
myservo.write(sc[n]);
Serial.print("Going to ");
Serial.print(scText[n]);
Serial.print( "(");
Serial.print(sc[n]);
Serial.println(")");
}