Post your code.
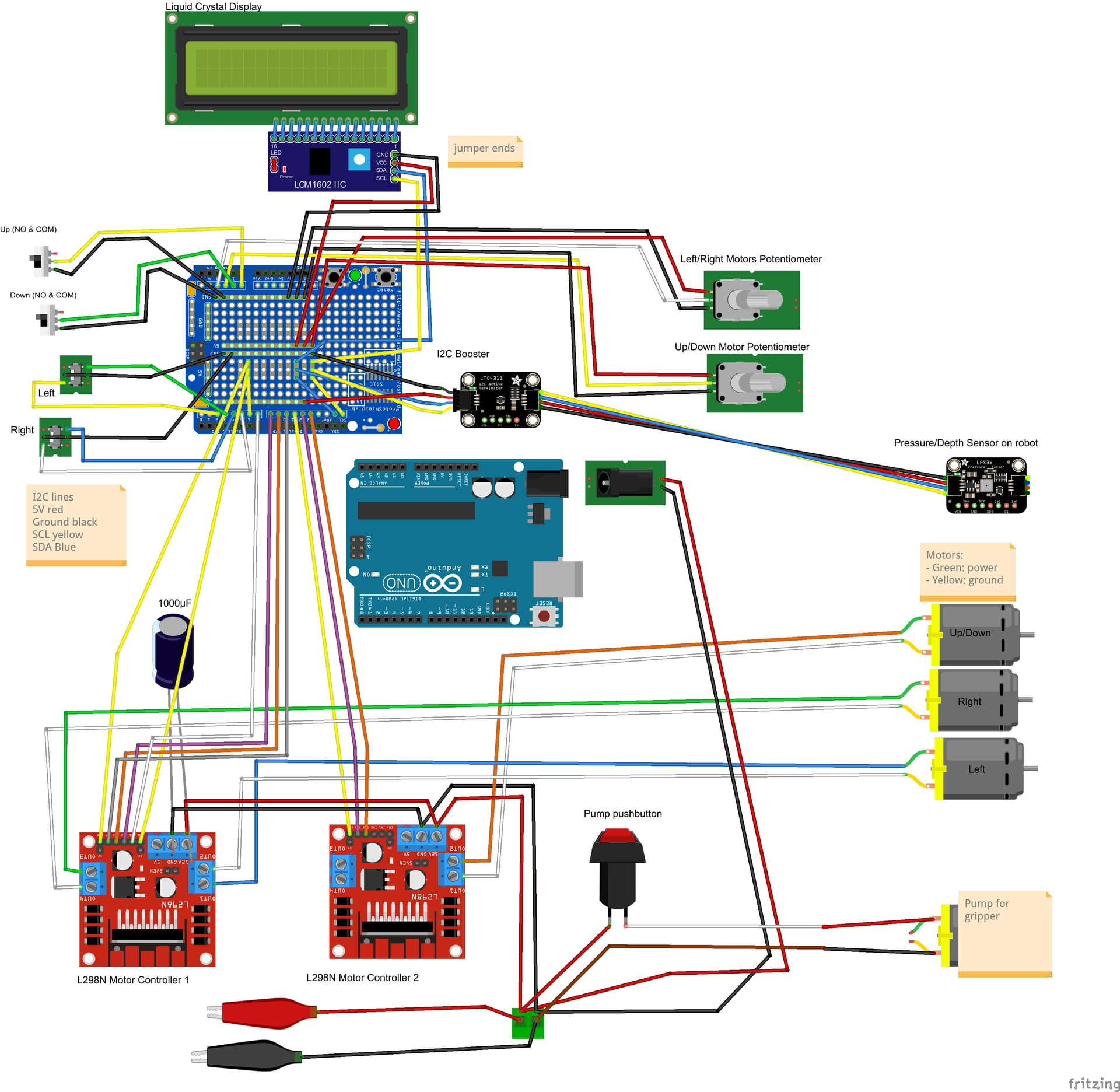
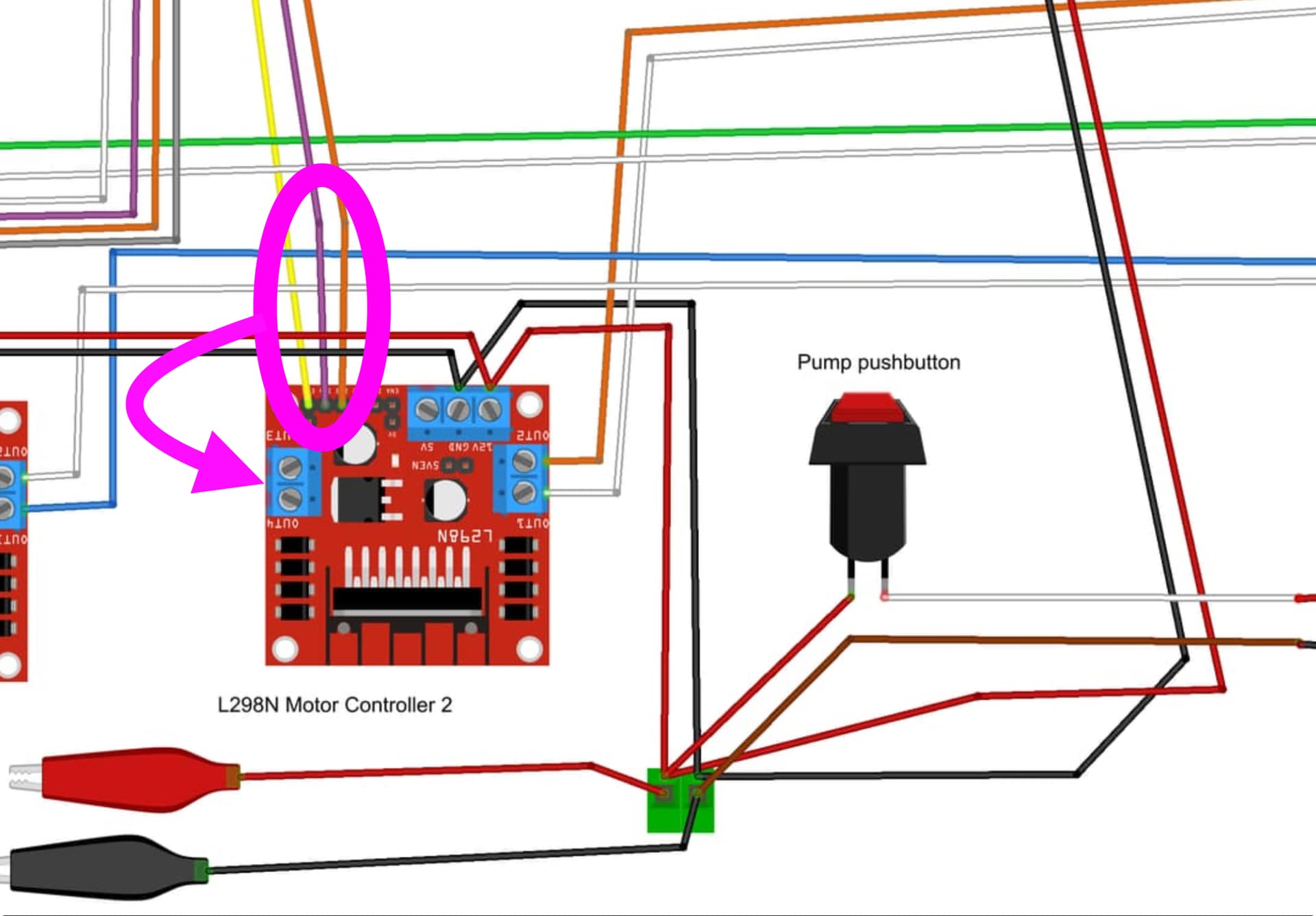
diagram.json code for the wokwi nerds
{
"version": 1,
"author": "foreignpigdog x",
"editor": "wokwi",
"parts": [
{ "type": "wokwi-arduino-nano", "id": "nano", "top": -62.4, "left": -106.1, "attrs": {} },
{
"type": "wokwi-slide-switch",
"id": "sw1",
"top": 59.4,
"left": -176.5,
"rotate": 270,
"attrs": { "value": "1" }
},
{
"type": "wokwi-slide-switch",
"id": "sw2",
"top": 97.8,
"left": -176.5,
"rotate": 270,
"attrs": { "value": "1" }
},
{ "type": "wokwi-potentiometer", "id": "pot1", "top": 133.1, "left": -125, "attrs": {} },
{ "type": "wokwi-potentiometer", "id": "pot2", "top": 133.1, "left": -201.8, "attrs": {} },
{
"type": "wokwi-led",
"id": "led1",
"top": -145.2,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "white" }
},
{
"type": "wokwi-led",
"id": "led2",
"top": -164.4,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "yellow" }
},
{
"type": "wokwi-led",
"id": "led3",
"top": -183.6,
"left": -142.6,
"rotate": 270,
"attrs": { "color": "magenta", "flip": "1" }
},
{
"type": "wokwi-led",
"id": "led4",
"top": -145.2,
"left": -142.6,
"rotate": 270,
"attrs": { "color": "orange", "flip": "1" }
},
{
"type": "wokwi-led",
"id": "led5",
"top": -164.4,
"left": -142.6,
"rotate": 270,
"attrs": { "color": "yellow", "flip": "1" }
},
{
"type": "wokwi-led",
"id": "led6",
"top": -183.6,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "magenta" }
},
{
"type": "wokwi-led",
"id": "led7",
"top": -212.4,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "orange" }
},
{
"type": "wokwi-led",
"id": "led8",
"top": -231.6,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "yellow" }
},
{
"type": "wokwi-led",
"id": "led9",
"top": -250.8,
"left": 64.2,
"rotate": 90,
"attrs": { "color": "#aaa" }
},
{
"type": "wokwi-text",
"id": "text1",
"top": -153.6,
"left": 105.6,
"attrs": { "text": "LEFT" }
},
{
"type": "wokwi-text",
"id": "text2",
"top": -220.8,
"left": 105.6,
"attrs": { "text": "RIGHT" }
},
{
"type": "wokwi-text",
"id": "text3",
"top": 67.2,
"left": -201.6,
"attrs": { "text": "UP" }
},
{
"type": "wokwi-text",
"id": "text4",
"top": 105.6,
"left": -230.4,
"attrs": { "text": "DOWN" }
},
{
"type": "wokwi-text",
"id": "text5",
"top": -153.6,
"left": -220.8,
"attrs": { "text": "UP/DOWN" }
},
{ "type": "wokwi-vcc", "id": "vcc1", "top": -229.64, "left": 153.6, "attrs": {} },
{ "type": "wokwi-gnd", "id": "gnd1", "top": -105.6, "left": 239.4, "attrs": {} },
{
"type": "wokwi-pushbutton",
"id": "btn1",
"top": -176.2,
"left": 163.2,
"attrs": { "color": "green", "xray": "1" }
},
{
"type": "wokwi-led",
"id": "led10",
"top": -195.6,
"left": 388.2,
"attrs": { "color": "red", "flip": "1" }
},
{ "type": "wokwi-relay-module", "id": "relay1", "top": -182.2, "left": 259.2, "attrs": {} },
{
"type": "wokwi-text",
"id": "text6",
"top": -115.2,
"left": 259.2,
"attrs": { "text": "INDEPENDENT PUMP" }
},
{
"type": "wokwi-text",
"id": "text7",
"top": 211.2,
"left": -201.6,
"attrs": { "text": "L/R" }
},
{
"type": "wokwi-text",
"id": "text8",
"top": 211.2,
"left": -124.8,
"attrs": { "text": "U/D" }
},
{
"type": "wokwi-lcd2004",
"id": "lcd1",
"top": 54.4,
"left": 53.6,
"attrs": { "pins": "i2c" }
},
{
"type": "wokwi-slide-switch",
"id": "sw3",
"top": -94.4,
"left": 67.7,
"rotate": 90,
"attrs": { "value": "1" }
},
{
"type": "wokwi-slide-switch",
"id": "sw4",
"top": -94.2,
"left": -138.1,
"rotate": 270,
"attrs": { "value": "" }
},
{ "type": "wokwi-text", "id": "text9", "top": -96, "left": 96, "attrs": { "text": "RIGHT" } },
{
"type": "wokwi-text",
"id": "text10",
"top": -96,
"left": -182.4,
"attrs": { "text": "LEFT" }
},
{
"type": "board-bmp180",
"id": "bmp1",
"top": 5.16,
"left": 56.54,
"rotate": 180,
"attrs": {}
},
{
"type": "wokwi-text",
"id": "text11",
"top": 19.2,
"left": 124.8,
"attrs": { "text": "PRESSURE" }
}
],
"connections": [
[ "nano:A0", "sw1:2", "yellow", [ "v0" ] ],
[ "sw2:2", "nano:A1", "limegreen", [ "h0" ] ],
[ "nano:GND.1", "sw1:1", "black", [ "v0" ] ],
[ "nano:GND.1", "sw2:1", "black", [ "v0" ] ],
[ "pot1:SIG", "nano:A2", "yellow", [ "v19.2", "h28.4" ] ],
[ "pot2:SIG", "nano:A3", "white", [ "v28.8", "h95.6" ] ],
[ "pot1:VCC", "nano:5V", "red", [ "v38.4", "h66.4" ] ],
[ "pot1:GND", "nano:GND.1", "black", [ "v48", "h86.4" ] ],
[ "pot2:VCC", "nano:5V", "red", [ "v38.4", "h172" ] ],
[ "pot2:GND", "nano:GND.1", "black", [ "v48", "h192" ] ],
[ "nano:13", "led4:A", "orange", [ "v9.6", "h-9.6", "v-86.4" ] ],
[ "nano:GND.1", "led4:C", "black", [ "v0" ] ],
[ "nano:GND.1", "led5:C", "black", [ "v0" ] ],
[ "nano:GND.1", "led3:C", "black", [ "v0" ] ],
[ "nano:11", "led5:A", "yellow", [ "v0" ] ],
[ "nano:12", "led3:A", "magenta", [ "v0" ] ],
[ "nano:GND.1", "led2:C", "black", [ "v0" ] ],
[ "nano:6", "led2:A", "yellow", [ "v0" ] ],
[ "nano:7", "led1:A", "white", [ "v0" ] ],
[ "nano:8", "led6:A", "magenta", [ "v0" ] ],
[ "nano:GND.1", "led6:C", "black", [ "v0" ] ],
[ "nano:6", "led8:A", "green", [ "v0" ] ],
[ "nano:GND.1", "led9:C", "black", [ "v0" ] ],
[ "nano:9", "led7:A", "gold", [ "v0" ] ],
[ "nano:10", "led9:A", "gray", [ "v0" ] ],
[ "nano:GND.1", "led8:C", "black", [ "v0" ] ],
[ "nano:GND.1", "led7:C", "black", [ "v0" ] ],
[ "nano:GND.1", "led1:C", "black", [ "v0" ] ],
[ "vcc1:VCC", "btn1:1.l", "red", [ "v0" ] ],
[ "gnd1:GND", "led10:C", "black", [ "v-9.6", "h192.4" ] ],
[ "gnd1:GND", "relay1:GND", "black", [ "v0" ] ],
[ "relay1:VCC", "btn1:2.r", "red", [ "h-19.2", "v9.6" ] ],
[ "btn1:2.r", "relay1:IN", "red", [ "h0" ] ],
[ "vcc1:VCC", "relay1:COM", "red", [ "v9.6", "h230.4", "v39.8" ] ],
[ "relay1:NO", "led10:A", "red", [ "h0" ] ],
[ "lcd1:GND", "nano:GND.1", "black", [ "h0" ] ],
[ "lcd1:VCC", "nano:5V", "red", [ "h0" ] ],
[ "lcd1:SDA", "nano:A4", "yellow", [ "h0" ] ],
[ "lcd1:SCL", "nano:A5", "cyan", [ "h0" ] ],
[ "nano:2", "sw4:3", "violet", [ "v-28.8", "h-207" ] ],
[ "nano:3", "sw4:1", "magenta", [ "v-9.6", "h-197.4" ] ],
[ "nano:GND.1", "sw4:2", "black", [ "v0" ] ],
[ "nano:GND.1", "sw3:2", "black", [ "v0" ] ],
[ "nano:4", "sw3:1", "#4f4", [ "v-48", "h67.2", "v19.4" ] ],
[ "nano:5", "sw3:3", "limegreen", [ "v-38.4", "h67.2", "v28.8" ] ],
[ "bmp1:VCC", "nano:5V", "red", [ "h0" ] ],
[ "bmp1:GND", "nano:GND.1", "black", [ "h0" ] ],
[ "bmp1:SCL", "nano:A5", "cyan", [ "h0" ] ],
[ "bmp1:SDA", "nano:A4", "yellow", [ "h0" ] ],
[ "nano:3.3V", "bmp1:3.3V", "gold", [ "v0" ] ]
],
"dependencies": {}
}