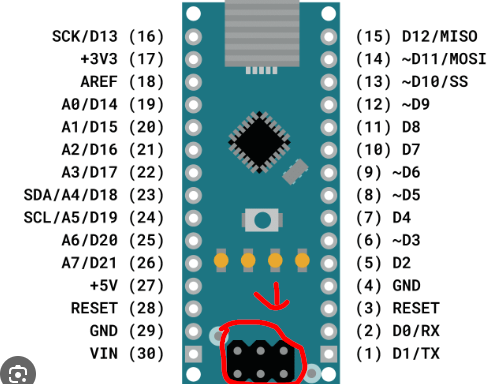
as you can see in the top right corner, the two potentiometers are not connected because
there are no analog pins left, so my question is, can we use the esp32 dev module instead of an Arduino nano? and can we power ESP32 by giving the VIN pin +5 volt
Code-
//Logo at remote Start
static const unsigned char PROGMEM my_logo[] =
{
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xff, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xff, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0xf0, 0x00, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7d, 0xf8, 0x00, 0x78, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x78, 0xf8, 0x07, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf8, 0xf0, 0x3c, 0x78, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x79, 0xc0, 0xf8, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0x80, 0xf8, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xff, 0xc0, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xff, 0xf0, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0xf1, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0xf1, 0xf0, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xe0, 0xf1, 0xfc, 0x00, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xf1, 0xf0, 0xff, 0xff, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xf0, 0x00, 0xff, 0xff, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0xfd, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00,
0x00, 0x00, 0x01, 0xfe, 0x00, 0x00, 0x00, 0x31, 0x80, 0x00, 0x00, 0x00, 0x01, 0xe0, 0x00, 0x00,
0x00, 0x00, 0x01, 0xfe, 0x00, 0x80, 0x00, 0x31, 0x80, 0x00, 0x00, 0x01, 0x81, 0xb0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x30, 0x03, 0xe0, 0x00, 0x31, 0x80, 0x00, 0x00, 0x03, 0xc3, 0x10, 0x00, 0x00,
0x00, 0x00, 0x00, 0x30, 0x03, 0x70, 0x00, 0x31, 0x80, 0x00, 0x00, 0x06, 0xc6, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x30, 0x04, 0x30, 0x00, 0x31, 0x80, 0x07, 0xe0, 0x06, 0xc4, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x30, 0x04, 0x18, 0x00, 0x31, 0x80, 0x07, 0xf0, 0x00, 0x64, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x60, 0x08, 0x1c, 0x00, 0x31, 0x80, 0x0c, 0xfe, 0x00, 0x6c, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x60, 0x08, 0x1e, 0x00, 0x31, 0x80, 0x0c, 0x1f, 0x00, 0x3c, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x40, 0x08, 0x1b, 0x01, 0xf1, 0x80, 0x08, 0x11, 0x80, 0x38, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x40, 0x08, 0x1b, 0x07, 0xf1, 0x80, 0x0c, 0x10, 0x80, 0x30, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x40, 0x0e, 0x19, 0x87, 0x31, 0xb0, 0x0e, 0x30, 0x80, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x40, 0x07, 0xf1, 0x86, 0x31, 0xfc, 0x0f, 0xf0, 0xc0, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x07, 0x31, 0xcc, 0x07, 0xe0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0xc0, 0x00, 0x00, 0x07, 0xf1, 0x8c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x01, 0xe1, 0x8d, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x00, 0x01, 0x8f, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x01, 0x8f, 0x01, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x7f, 0x00, 0x00, 0x0f, 0xf8, 0x00, 0x00, 0x03, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x7e, 0x00, 0x00, 0x18, 0x07, 0x00, 0x00, 0x03, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x70, 0x03, 0x80, 0x00, 0x03, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x42, 0xc8, 0x40, 0x00, 0x07, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0xc3, 0xfc, 0x60, 0x00, 0x07, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x8f, 0xfe, 0x60, 0x00, 0x7f, 0x7e, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x1c, 0x86, 0x20, 0x00, 0x4b, 0x0a, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x32, 0x73, 0x30, 0x00, 0x7c, 0xfe, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x3b, 0x3f, 0x90, 0x00, 0x7e, 0x7e, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x02, 0x3f, 0x09, 0x90, 0x00, 0x1f, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x02, 0x27, 0xcf, 0x90, 0x00, 0x03, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x02, 0x39, 0x33, 0x90, 0x00, 0x03, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x02, 0x30, 0xc9, 0x80, 0x00, 0x03, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x3e, 0x4f, 0x90, 0x00, 0x03, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x3d, 0xd3, 0x30, 0x71, 0xc0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x01, 0x1c, 0x8e, 0x20, 0x51, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x8e, 0x7c, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0xc3, 0xf0, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x01, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x38, 0x07, 0x80, 0x7f, 0xc7, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x0f, 0xfc, 0x00, 0x40, 0x44, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xf0, 0x00, 0x40, 0x44, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0xc7, 0xe4, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7f, 0xc7, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <EEPROM.h>
#define OLED_RESET 8
Adafruit_SSD1306 display(OLED_RESET);
#define NUMFLAKES 5
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#if (SSD1306_LCDHEIGHT != 64)
#endif
const uint64_t pipeOut = 0xE8E8F0F0E1LL;
RF24 radio(9, 10);
struct MyData {
byte throttle;
byte yaw;
byte pitch;
byte roll;
byte AUX1;
byte AUX2;
};
MyData data;
int battery_in = A7;
int buttons_analog_in = A6;
int toggle_1 = 3;
int toggle_2 = 2;
int throttle_in = A0;
int yaw_in = A1;
int pitch_in = A2;
int roll_in = A3;
int mode_in = 4;
int buzzer = 5;
float battery_level = 0;
int throttle_fine = 0;
int yaw_fine = 0;
int pitch_fine = 0;
int roll_fine = 0;
int button_read = 0;
int throttle_to_send = 0;
int yaw_to_send = 0;
int pitch_to_send = 0;
int roll_to_send = 0;
bool throttle_inverted = false;
bool yaw_inverted = true;
bool pitch_inverted = true;
bool roll_inverted = false;
bool yaw_decrease = false;
bool throttle_decrease = false;
bool pitch_decrease = false;
bool roll_decrease = false;
bool yaw_increase = false;
bool throttle_increase = false;
bool pitch_increase = false;
bool roll_increase = false;
bool mode = true;
bool mode_button_pressed = false;
bool sound = true;
int counter = 0;
int invert_counter = 0;
bool sound_changed = false;
void resetData()
{
data.throttle = 127;
data.yaw = 127;
data.pitch = 127;
data.roll = 127;
data.AUX1 = 0;
data.AUX2 = 0;
}
void setup()
{
if( EEPROM.read(1) != 55)
{
EEPROM.write(2, 127);
EEPROM.write(3, 127);
EEPROM.write(4, 127);
EEPROM.write(5, 127);
EEPROM.write(6, 0);
EEPROM.write(7, 1);
EEPROM.write(8, 1);
EEPROM.write(9, 0);
EEPROM.write(1, 55);
}
throttle_fine = EEPROM.read(2);
yaw_fine = EEPROM.read(3);
pitch_fine = EEPROM.read(4);
roll_fine = EEPROM.read(5);
throttle_inverted = EEPROM.read(6);
yaw_inverted = EEPROM.read(7);
pitch_inverted = EEPROM.read(8);
roll_inverted = EEPROM.read(9);
pinMode(buttons_analog_in, INPUT);
pinMode(mode_in, INPUT_PULLUP);
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer,LOW);
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
delay(100);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.drawBitmap(0, 0, my_logo, 128, 64, 1);
digitalWrite(buzzer,HIGH);
delay(40);
digitalWrite(buzzer,LOW);
delay(40);
digitalWrite(buzzer,HIGH);
delay(40);
digitalWrite(buzzer,LOW);
display.display();
delay(2000);
radio.begin();
radio.setAutoAck(false);
radio.setPALevel(RF24_PA_HIGH);
radio.setDataRate(RF24_250KBPS);
radio.openWritingPipe(pipeOut);
resetData();
}
int map_normal(int val, int lower, int middle, int upper, bool reverse)
{
val = constrain(val, lower, upper);
if ( val < middle )
val = map(val, lower, middle, 0, 128);
else
val = map(val, middle, upper, 128, 255);
return ( reverse ? 255 - val : val );
}
int map_exponential(int val, bool reverse)
{
val = constrain(val, 0, 1023);
float cube = ((pow((val - 512),3)/520200) + 258.012) / 2;
return ( reverse ? 255 - cube : cube );
}
void loop()
{
battery_level = analogRead(battery_in) * (5.0/1024)*((4700.0 + 10000.0)/10000.0);
button_read = analogRead(buttons_analog_in);
if(button_read > 820)
{
yaw_decrease = false;
throttle_decrease = false;
pitch_decrease = false;
roll_decrease = false;
yaw_increase = false;
throttle_increase = false;
pitch_increase = false;
roll_increase = false;
}
if(button_read < 260 && button_read > 200 && !yaw_decrease)
{
yaw_fine = yaw_fine + 1;
yaw_decrease = true;
EEPROM.write(3, yaw_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 120 && button_read > 50 && !yaw_increase)
{
yaw_fine = yaw_fine - 1;
yaw_increase = true;
EEPROM.write(3, yaw_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 500 && button_read > 430 && !throttle_decrease)
{
throttle_fine = throttle_fine + 1;
throttle_decrease = true;
EEPROM.write(2, throttle_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 380 && button_read > 320 && !throttle_increase)
{
throttle_fine = throttle_fine - 1;
throttle_increase = true;
EEPROM.write(2, throttle_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 610 && button_read > 550 && !pitch_decrease)
{
pitch_fine = pitch_fine + 1;
pitch_decrease = true;
EEPROM.write(4, pitch_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 690 && button_read > 630 && !pitch_increase)
{
pitch_fine = pitch_fine - 1;
pitch_increase = true;
EEPROM.write(4, pitch_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 820 && button_read > 760 && !roll_decrease)
{
roll_fine = roll_fine + 1;
roll_decrease = true;
EEPROM.write(5, roll_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(button_read < 760 && button_read > 700 && !roll_increase)
{
roll_fine = roll_fine - 1;
roll_increase = true;
EEPROM.write(5, roll_fine);
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(!digitalRead(mode_in) && !mode_button_pressed)
{
mode = !mode;
mode_button_pressed = true;
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
if(!digitalRead(mode_in) && !sound_changed)
{
if(counter > 20)
{
sound = !sound;
counter = 0;
sound_changed = true;
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
}
counter = counter + 1;
}
if(button_read < 500 && button_read > 430)
{
if(invert_counter > 30)
{
throttle_inverted = !throttle_inverted;
invert_counter = 0;
EEPROM.write(6, throttle_inverted);
display.clearDisplay();
display.setCursor(13,30);
display.print("Throttle inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
if(button_read < 260 && button_read > 200)
{
if(invert_counter > 30)
{
yaw_inverted = !yaw_inverted;
invert_counter = 0;
EEPROM.write(7, yaw_inverted);
display.clearDisplay();
display.setCursor(15,30);
display.print(" Yaw inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
if(button_read < 610 && button_read > 550)
{
if(invert_counter > 30)
{
pitch_inverted = !pitch_inverted;
invert_counter = 0;
EEPROM.write(8, pitch_inverted);
display.clearDisplay();
display.setCursor(13,30);
display.print(" Pitch inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
if(button_read < 820 && button_read > 760)
{
if(invert_counter > 30)
{
roll_inverted = !roll_inverted;
invert_counter = 0;
EEPROM.write(9, roll_inverted);
display.clearDisplay();
display.setCursor(15,30);
display.print(" Roll inverted");
display.display();
if(sound)
{
digitalWrite(buzzer,HIGH);
delay(50);
digitalWrite(buzzer,LOW);
}
delay(1500);
}
invert_counter = invert_counter + 1;
}
if(digitalRead(mode_in) && mode_button_pressed)
{
mode_button_pressed= false;
sound_changed = false;
counter = 0;
invert_counter = 0;
}
if(!mode)
{
throttle_to_send = map_normal(analogRead(throttle_in), 0, 512, 1023, throttle_inverted);
yaw_to_send = map_normal(analogRead(yaw_in), 0, 512, 1023, yaw_inverted);
pitch_to_send = map_normal(analogRead(pitch_in), 0, 512, 1023, pitch_inverted);
roll_to_send = map_normal(analogRead(roll_in), 0, 512, 1023, roll_inverted);
}
if(mode)
{
throttle_to_send = map_exponential(analogRead(throttle_in), throttle_inverted);
yaw_to_send = map_exponential(analogRead(yaw_in), yaw_inverted);
pitch_to_send = map_exponential(analogRead(pitch_in), pitch_inverted);
roll_to_send = map_exponential(analogRead(roll_in), roll_inverted);
}
throttle_to_send = throttle_to_send + throttle_fine - 127;
yaw_to_send = yaw_to_send + yaw_fine - 127;
pitch_to_send = pitch_to_send + pitch_fine - 127;
roll_to_send = roll_to_send + roll_fine - 127;
data.throttle = constrain(throttle_to_send,0,255);
data.yaw = constrain(yaw_to_send,0,255);
data.pitch = constrain(pitch_to_send,0,255);
data.roll = constrain(roll_to_send,0,255);
data.AUX1 = digitalRead(toggle_1);
data.AUX2 = digitalRead(toggle_2);
radio.write(&data, sizeof(MyData));
display.clearDisplay();
if(sound)
{
display.setCursor(0,0);
display.print("Sound ON");
}
if(!sound)
{
display.setCursor(0,0);
display.print("Sound OFF");
}
display.setCursor(90,0);
display.print(battery_level,1);
display.print("V");
display.setCursor(0,16);
display.print("T: ");
display.print(throttle_to_send);
display.print(" P: ");
display.print(pitch_to_send);
display.setCursor(0,29);
display.print("Y: ");
display.print(yaw_to_send);
display.print(" R: ");
display.print(roll_to_send);
display.setCursor(0,42);
display.print("SW1: ");
display.print(digitalRead(toggle_1));
display.print(" SW2: ");
display.print(digitalRead(toggle_2));
if(mode)
{
display.setCursor(0,56);
display.print("Mode: ");
display.print("Exponential");
}
if(!mode)
{
display.setCursor(0,56);
display.print("Mode: ");
display.print("Linear");
}
display.display();
}