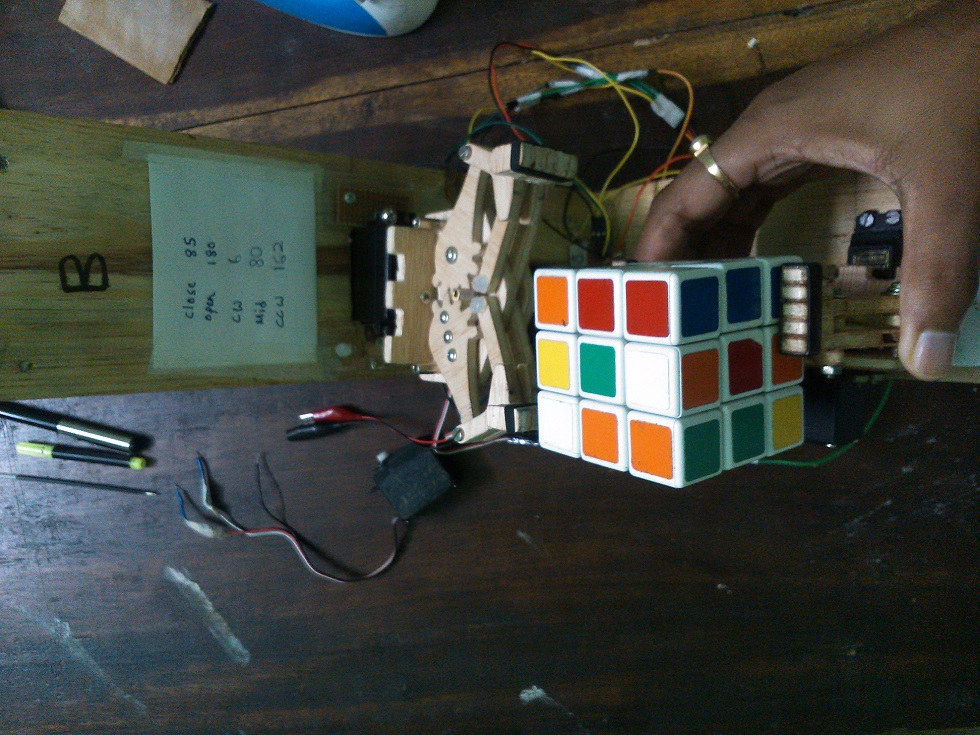
my project is almost done....but the cube falls off. This happens since the grippers are slightly off centered....i mean the grippers hold the cube off-centered. Me and my project partners are not being able to figure out how to correct this. I am going to give a last try tomorrow by shifting the grippers closer to each other almost so as they touch each other. Will that work out?
Thanx a lot for that drawing. We aligned the grippers near-perfectly. Somehow.
Theres another problem now. We were using an indian clone called induinoX. I dont knw why but after scanning 4 sides of the cube. The message arduino not responding shows up in the console window.
I tried reducing the baud rate of serial communication in both cube mover.ino as well as in the python script to 9600 but it still doesnot work.
Probably not enough juice for the Arduino
try checking with a DVM
How do you power the board ??
I dont know why but after scanning 4 sides of the cube...
Seems that you get problems when the BACK wrist servo starts playing
My guess:
At some point, this servo may be blocked fully CW or CCW and sucks current
try moving the servo arm by one or two steps
No the grippers dont get stuck or anything.
When i press scan cube button. it scans the faces one by one but after scanning foursides, when its about to scan the up face. It gives the error.
Arduino and servo grounds are connected.
I tried the test button. this time the grippers move perfectly for all moves. I think the serial communication gets garbled messages?
can that happen? my baud rate is now 9600...should i try and decrease it?
also, what is the front 2 scan function? why should we scan the front face twice?
I have around a month's time to fix the robot completely to solve it. I will be leaving my college after a month. Today i showed the robot to our head of department and he was so impressed by it (he is a very hard-to-impress man). I want to gift our robot to our college's department. Can you help me diagnose the problem. I tried replacing the arduino with another one (this one is the official arduino uno) but the problem still persists.
I have around a month's time to fix the robot completely to solve it. I will be leaving my college after a month
That plenty of time
Please answer ALL questions
I tried the test button. this time the grippers move perfectly for all moves
Please test again and confirm it actually works
Uninstall the cube
run "Scan colors"
2) Do you still have communication problems when the cube is removed (reduced servo's load)
If you still get the error message:
Disconnect all four servo's (remove plugs from shield) and run "Scan colors"
You should see debugging info in your Python shell
Re-connect the two FRONT servo's only (camera side)
Run "Scan colors" again
4) Are the two servo's running OK ??
5) Do you see debug info as per above ??
Re-connect the BACK pinch servo (only BACK wrist servo is left disconnected)
Run "Scan colors" again
6) Are the three servo's running OK ??
7) Do you see debug info as per above ??