Hello. I was interested in continuing an older thread about SAMD21 TC PPW to which many of you have already responded, but it is old and now locked.
I am new to SAM21 SoCs - more experience with STM32 and smaller PIC12/14/16 SoCs. So I will probably ask a question that has already been answered; my apologies in advance.
Briefly, I used code once posted by MartinL in Arduino Zero TCC Capture - Arduino Zero - Arduino Forum to get started with capturing a fairly slow wave, but with millisecond accuracy. I changed the dividers and prescalers to step TC3 at 10000 Hz, and wired a 555 to generate test patterns on the input pin. MartinL's code got some very nice results (Thank You, MartinL).
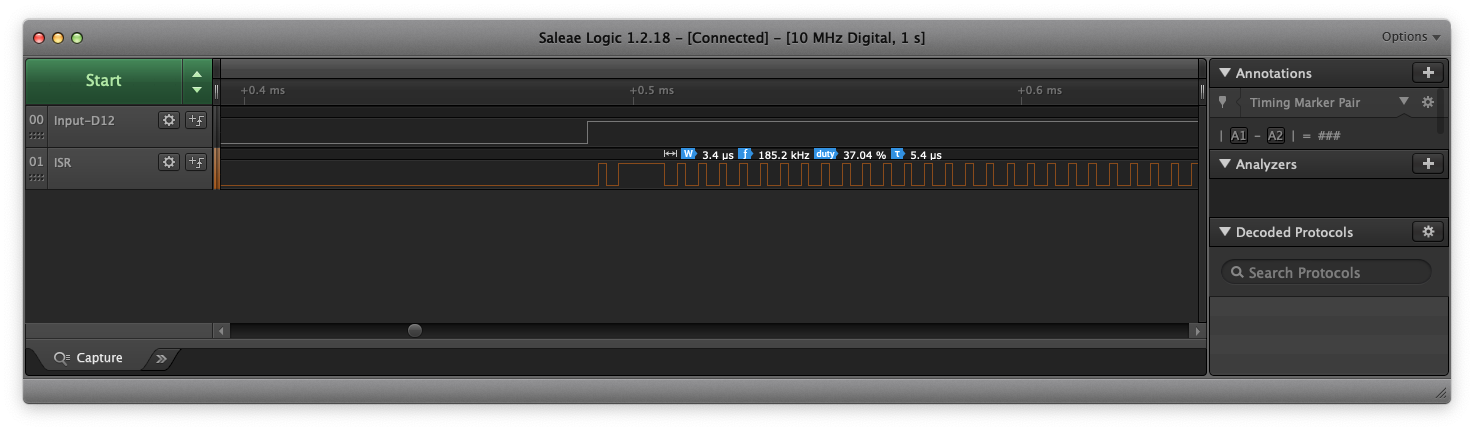
But I noticed something I cannot explain. I instrumented the ISR ( TC3_Handler() ) by having it toggle a pin when invoked. I see that the ISR is being invoked continuously when the input (the waveform) pin is high. After the wave's rising edge, the ISR fires and I see the time taken to sync-read the counter to complete the previous cycle. It returns, but then runs again in 3us - as fast as it can, but there is nothing to do. MC1/MC0 are not set in INTFLAG.
Once the input waveform falling edge arrives, the ISR is not called again until the next rising edge. So I cannot figure out why the handler is being triggered during the pulse phase (high level) of the input.
I added more instrumentation and I see that TC3 INTENA is only what I expect, MC1/MC0. When the ISR is entered over and over, INTFLAG is nothing but SYNCRDY. But that interrupt is not ENAbled, and I even added a write to to INTCLR to make sure it was masked.
Being new to this level of Arduino coding (I've always used it only at the high level before), there's a lot BSP/HAL under here that I have yet to learn. Can anyone shed light? In my case, this could consume 30-40% of the CPU and affect power savings - so, I'm curious 
Images attached, and code below.
Thank you for your time.
-wt


// Setup TC3 to capture pulse-width and period
volatile boolean periodComplete;
volatile uint16_t isrPeriod;
volatile uint16_t isrPulsewidth;
uint16_t period;
uint16_t pulsewidth;
const int scopePin = 13;
void TC3_Handler(void);
void setup()
{
Serial.begin(115200); // Send data back on the Zero's programming port
while (! Serial); // Wait for the Serial port to be ready
pinMode(scopePin, OUTPUT);
digitalWrite(scopePin, LOW);
REG_PM_APBCMASK |= PM_APBCMASK_EVSYS; // Switch on the event system peripheral
REG_GCLK_GENDIV = GCLK_GENDIV_DIV(75) | // Divide the 48MHz system clock by 75 = 640,000Hz
GCLK_GENDIV_ID(5); // Set division on Generic Clock Generator (GCLK) 5
while (GCLK->STATUS.bit.SYNCBUSY); // Wait for synchronization
REG_GCLK_GENCTRL = GCLK_GENCTRL_IDC | // Set the duty cycle to 50/50 HIGH/LOW
GCLK_GENCTRL_GENEN | // Enable GCLK 5
GCLK_GENCTRL_SRC_DFLL48M | // Set the clock source to 48MHz
GCLK_GENCTRL_ID(5); // Set clock source on GCLK 5
while (GCLK->STATUS.bit.SYNCBUSY); // Wait for synchronization
REG_GCLK_CLKCTRL = GCLK_CLKCTRL_CLKEN | // Enable the generic clock...
GCLK_CLKCTRL_GEN_GCLK5 | // ....on GCLK5
GCLK_CLKCTRL_ID_TCC2_TC3; // Feed the GCLK5 to TCC2 and TC3
while (GCLK->STATUS.bit.SYNCBUSY); // Wait for synchronization
REG_EIC_EVCTRL |= EIC_EVCTRL_EXTINTEO3; // Enable event output on external interrupt 3
//EIC->CONFIG[0].reg |= EIC_CONFIG_SENSE3_BOTH; // Set event detecting changes to level
attachInterrupt(12, TC3_Handler, HIGH); // Attach interrupts to digital pin 12 (external interrupt 3)
REG_EVSYS_USER = EVSYS_USER_CHANNEL(1) | // Attach the event user (receiver) to channel 0 (n + 1)
EVSYS_USER_USER(EVSYS_ID_USER_TC3_EVU); // Set the event user (receiver) as timer TC3
REG_EVSYS_CHANNEL = EVSYS_CHANNEL_EDGSEL_NO_EVT_OUTPUT | // No event edge detection
EVSYS_CHANNEL_PATH_ASYNCHRONOUS | // Set event path as asynchronous
EVSYS_CHANNEL_EVGEN(EVSYS_ID_GEN_EIC_EXTINT_3) | // Set event generator (sender) as external interrupt 3
EVSYS_CHANNEL_CHANNEL(0); // Attach the generator (sender) to channel 0
REG_TC3_EVCTRL |= TC_EVCTRL_TCEI | // Enable the TC event input
/*TC_EVCTRL_TCINV |*/ // Invert the event input
TC_EVCTRL_EVACT_PPW; // Set up the timer for capture: CC1 period, CC0 pulsewidth
REG_TC3_READREQ = TC_READREQ_RREQ | // Enable a read request
TC_READREQ_ADDR(0x06); // Offset of the CTRLC register
while (TC3->COUNT16.STATUS.bit.SYNCBUSY); // Wait for (read) synchronization
REG_TC3_CTRLC |= TC_CTRLC_CPTEN1 | // Enable capture on CC1
TC_CTRLC_CPTEN0; // Enable capture on CC0
while (TC3->COUNT16.STATUS.bit.SYNCBUSY); // Wait for (write) synchronization
//NVIC_DisableIRQ(TC3_IRQn);
//NVIC_ClearPendingIRQ(TC3_IRQn);
NVIC_SetPriority(TC3_IRQn, 0); // Set the Nested Vector Interrupt Controller (NVIC) priority for TC3 to 0 (highest)
NVIC_EnableIRQ(TC3_IRQn); // Connect the TC3 timer to the Nested Vector Interrupt Controller (NVIC)
REG_TC3_INTENSET = TC_INTENSET_MC1 | // Enable compare channel 1 (CC1) interrupts
TC_INTENSET_MC0; // Enable compare channel 0 (CC0) interrupts
REG_TC3_INTENCLR = TC_INTENCLR_SYNCRDY;
REG_TC3_CTRLA |= TC_CTRLA_PRESCALER_DIV64 | // Set prescaler to 64, 640kHz/64 = 10kHz
TC_CTRLA_ENABLE; // Enable TC3
while (TC3->COUNT16.STATUS.bit.SYNCBUSY); // Wait for synchronization
}
void loop()
{
if (periodComplete) // Check if the period is complete
{
noInterrupts(); // Read the new period and pulse-width
period = isrPeriod;
pulsewidth = isrPulsewidth;
periodComplete = false; // Start a new period
interrupts();
Serial.print(period); // Output the results
Serial.print(F(" "));
Serial.println(pulsewidth);
}
}
void TC3_Handler() // Interrupt Service Routine (ISR) for timer TC3
{
digitalWrite(scopePin, HIGH);
// Check for match counter 0 (MC0) interrupt
if (TC3->COUNT16.INTFLAG.bit.MC0)
{
REG_TC3_READREQ = TC_READREQ_RREQ | // Enable a read request
TC_READREQ_ADDR(0x18); // Offset address of the CC0 register
while (TC3->COUNT16.STATUS.bit.SYNCBUSY); // Wait for (read) synchronization
isrPeriod = REG_TC3_COUNT16_CC0; // Copy the period
periodComplete = true; // Indicate that the period is complete
}
// Check for match counter 1 (MC1) interrupt
if (TC3->COUNT16.INTFLAG.bit.MC1)
{
REG_TC3_READREQ = TC_READREQ_RREQ | // Enable a read request
TC_READREQ_ADDR(0x1A); // Offset address of the CC1 register
while (TC3->COUNT16.STATUS.bit.SYNCBUSY); // Wait for (read) synchronization
isrPulsewidth = REG_TC3_COUNT16_CC1; // Copy the pulse-width
}
digitalWrite(scopePin, LOW);
}