hello everybody!!
as new as it gets here, so please go easy on me!!
ive got a pretty small project that im starting out with, it involves moving a small, lightweight wheeled stage, with a linear actuator, an arduino and a motor controller.
i really hope i can get this done on my own with some love in the right direction, but if i cant, if anyone would like a bit of pay for code, i can arrange that if im over my head.
id like to have a breadboard button to stop, and another button to start it
in one version id like it to just slowly go back and forth.
in my 2nd version id like the code to have a random effect ……. that continually gives a random direction, speed and distance for the linear actuator.
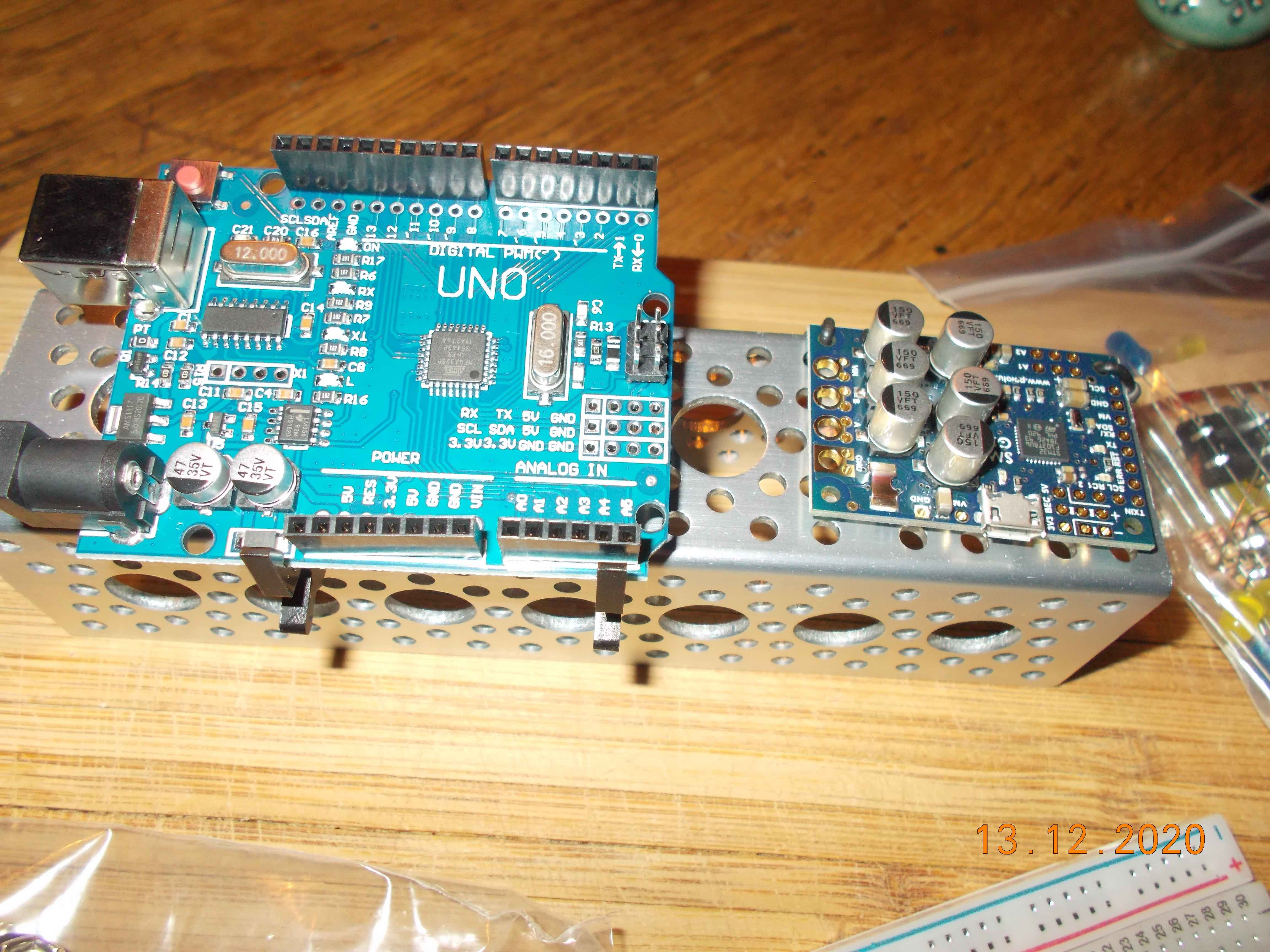
so here’s what I’ve got (it’s all in the photos by the way)
-linear actuator with 8’’ stroke and built in 5 wire type potentiometer
-arduino - navy blue with “digital PWM” written on it. maybe a knock off.
-arduino uno r3 - official - coming in a few days
-Pololu high power simple motor controller G2 18v25
-breadboard, wires, buttons etc
Id like to keep this linear actuator in constant motion, but it’s only got a 25% duty cycle. when i called up servocity they told me id get away with it if i run a fan blowing on it, and also at least run a 75% duty cycle - in other words, it’ll be paused 25% of the time.
So ive dug into this a little bit so far, and i think ill probably have to run the randomSeed(millis() command, and i’m looking out for potential issues around commands arriving before others go out, so I’m thinking that as far as the random speed/direction/distance goes, maybe i would be better off calling a minimum distance travelled for each random change, thus giving time for output of the next line of code.
i think that’s it!!!! thank you community!
-SparkleUnicorn ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()