I am working on a small drone project. I used breadboard to connect motor,mosfet,nano, LIPO battery for testing. Motor spins pretty slow. It cannot lift the frame without any extra load, doesn't even move it.
afedorov:
I used breadboard to connect motor,mosfet,nano, LIPO battery for testing.
A breadboard can't handle the ~8Amp stall current of each motor.
And maybe your battery/mosfet/motor wiring has problems with that too.
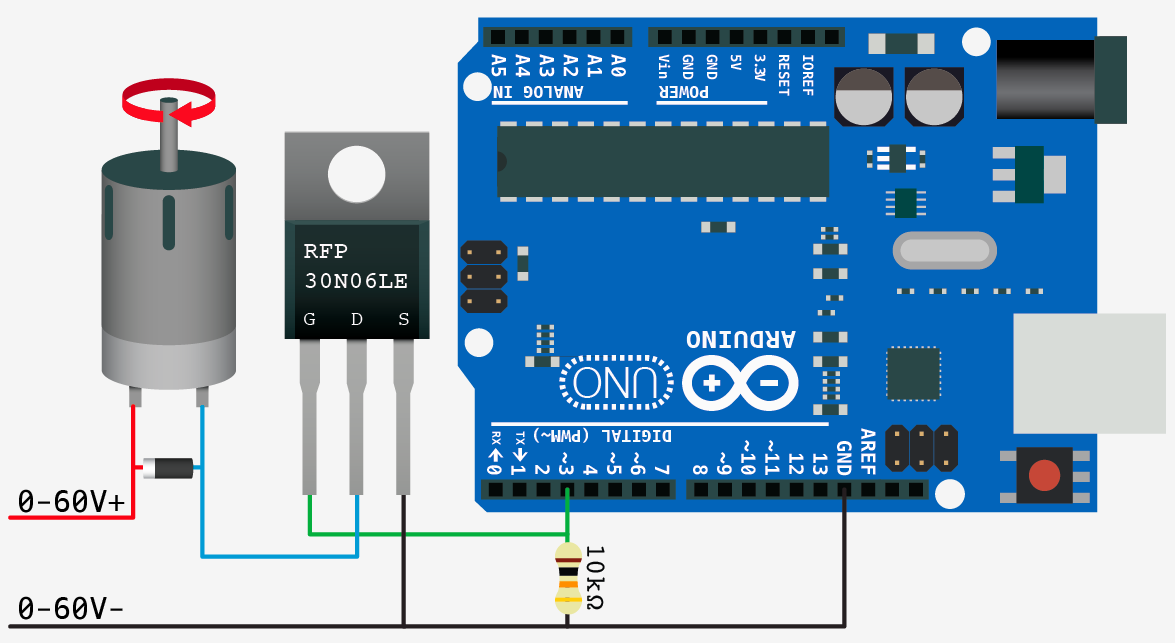
Do you have a schottky diode across each motor.
How is the Nano powered.
Post a real picture of the Nano setup, instead of a useless universal Fritzing picture of an Uno.
Leo..
afedorov:
I pushed motor to the highest value( analogWrite(3,255) and measured the voltage across motor's pins. It was 2.7-3V. It looks too low.
Every wire and breadboard contact is a resistor.
Thin wires have a higher resistance.
I guess you have about 50cm of thin wire between the battery and the motor.
That will have some voltdrop when the motor has to work hard.
You could measure where the most voltdrop occurs.
Leo..
Is it safe to do a simple test - just plug in my 3.7v lipo to a motor?
Yes.
You should solder all motor and power connections. You may have damaged the breadboard tracks with your early experiments, as they can be burned by currents of less than 1 Amp.