Bonjour,
Je ne suis pas du genre à demander de l'aide mais là je sèche.
Je viens de recevoir mon module GPS -> gps6mv2
Celui-ci :

J'ai fait mes testes avec une NANO et UNO.
Après plusieurs recherche sur internet pour voir comment le faire fonctionner, je tombe sur les librairies TinyGPS, TinyGPS++ et Adafruit_GPS
Après plusieurs testes avec TinyGPS ou TinyGPS++ rien de concluant. J'ai vu sur d'autres forum que les libs TinyGPS et TinyGPS++ peuvent être instable. Du coup j'ai testé avec Adafruit_GPS et là mm résultat à savoir rien du tout.
Le rien du tout c'est quoi ? ![]()
-
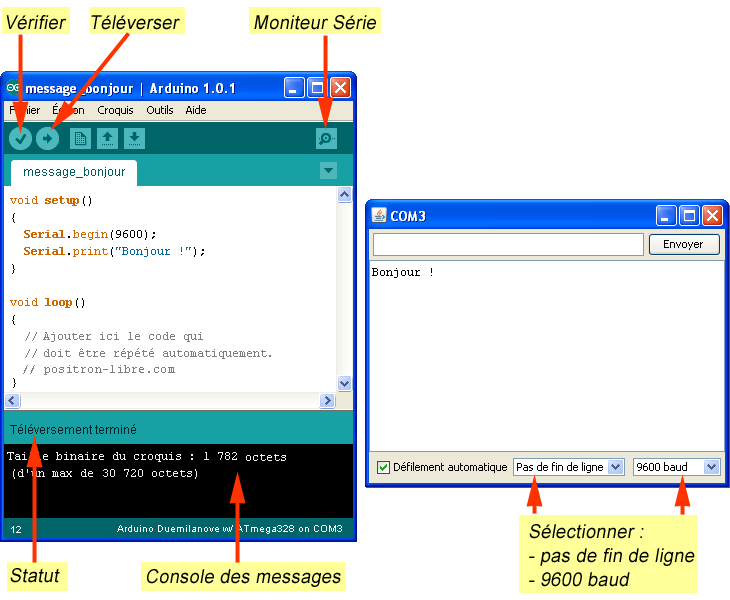
lorsque je teste les Sketch d'exemple des Lib Tiny par exemple celui-ci : DeviceExemple -> j'obtiens toujours ceci dans le moniteur série : No GPS detected: check wiring.
-
j'ai testé un autre Sketch TibyGPS -> test_with_gps_device (un d'exemple de la lib) : j’obtiens ceci :

A chaque fois j'ai bien pris le temps de modifier les Pins RX et TX pour correspondre à mon branchement.
Dans mon cas le branchement est le suivant :
- GPS VCC -> 5v Arduino
- GPS RX -> Pin 8 Arduino
- GPS TX -> Pin 9 Arduino
- GPS GND -> GND Arduino
Plusieurs points me laisse perplexe :
- jusqu'à maintenant, j'ai 0 led qui s'allume sur le GPS (il me semble que normalement elle devrait clignoter mais ce n'est pas le cas)
- j'ai vu également que le GPS pourrait être en mode binaire (pas bien certain de ce que j'ai lu en anglais) comment s'en assurer ? et que dois-je faire dans ce cas ?
J'ai l'impression que le GPS est mort mais comment s'en assurer ?
J'espère avoir été assez clair et merci d'avance pour votre aide .