I soldered together two MCP2515-Boards and an Arduino Nano as seen in the enclosed picture:
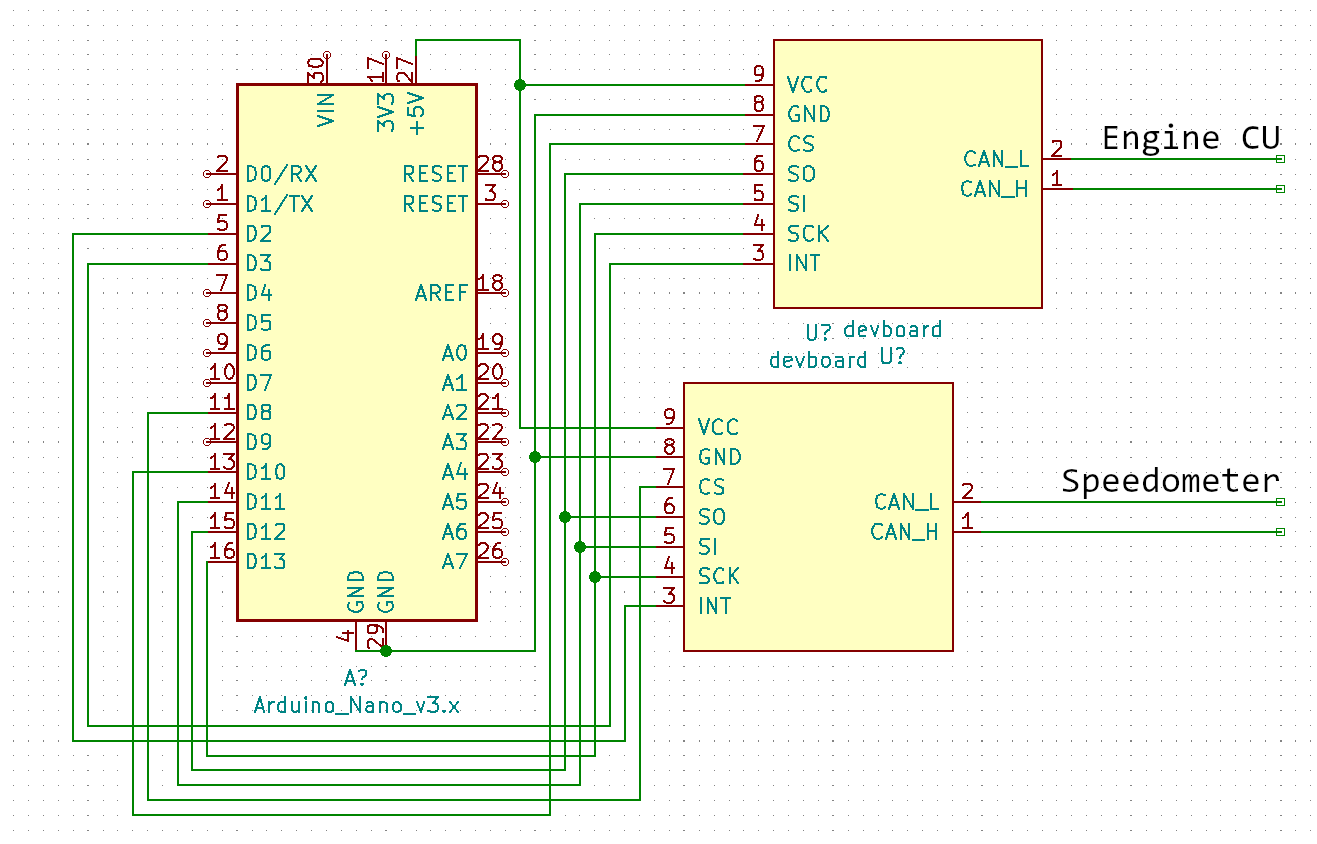
I connected it between my ECU and the Speedometer in my car. Speed is 500kBit/s and the MCP2515 is configured to 8MHz. I also added 120 Ohm termination-Resistors to both CAN-Lines.
The library I used: GitHub - coryjfowler/MCP_CAN_lib: MCP_CAN Library
The code I used is quite similar to the "dual_can"-example given in the library above, just reconfigured as said above and added some logs.
However, my ecu seems to have problems communicating with the speedometer when I add the arduino, even though all messages are transmitted through. I noticed that because the error log tells me "missing communication to speedometer".
Yes, I have to split the CAN-Cables, the goal is to remove the speedometer and answer the ECU's requests on startup and also later on.
Has anyone worked with this before or has any ideas as to why my ecu does not want to communicate through the arduino with the speedometer?