Hi,
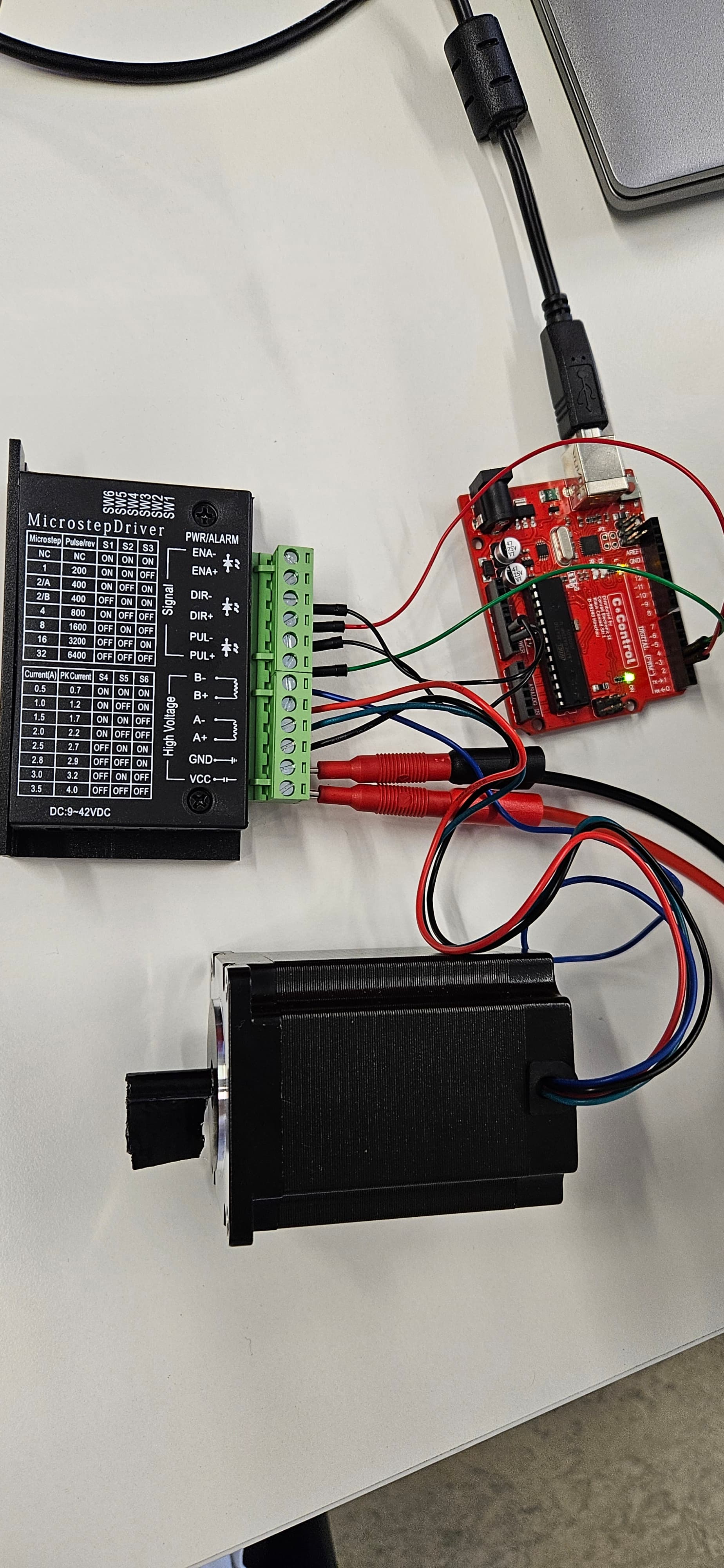
I have Co-Control Arduino Uno , Joy-IT Motordriver SBC-MD-TB6600, Joy-IT NEMA23-05, and power supply VOLTCRAFT LPS1305.
I follow tutorial from
I want to just spin the step motor very fast, maybe 600-1000 RPM. But I could get it to like ~350 RPM before the motor vibrate and stall.
VOLTCRAFT power supply give 30V during the test.

TB6600 driver is compatible with NEMA23-05 as specified in the spec.
NEMA23-05 can reach 1440 RPM according to
I set the switch 1,2,3 of the motordriver to ON, OFF, OFF for microstep4 and pulse/rev 800
and 4,5,6 to ON,ON,OFF for current of 1.5A.
/* Example sketch to control a stepper motor with TB6600 stepper motor driver
and Arduino without a library: continuous rotation.
More info: https://www.makerguides.com */
// Define stepper motor connections:
#define dirPin 2
#define stepPin 3
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
// Set the spinning direction CW/CCW:
digitalWrite(dirPin, HIGH);
}
int step_delay = 120;
void loop() {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(step_delay);
digitalWrite(stepPin, LOW);
delayMicroseconds(step_delay);
}
step_delay = 120 is the smallest step I can use before stalling at 110 with a lot vibration.
Thank for the help.