Hello everyone,
I’ve been working on a project to establish communication using Arduino Uno with a vehicle's K-Line (ISO 9141-2) protocol, but I’ve hit a roadblock that I can’t seem to solve despite spending countless hours troubleshooting.
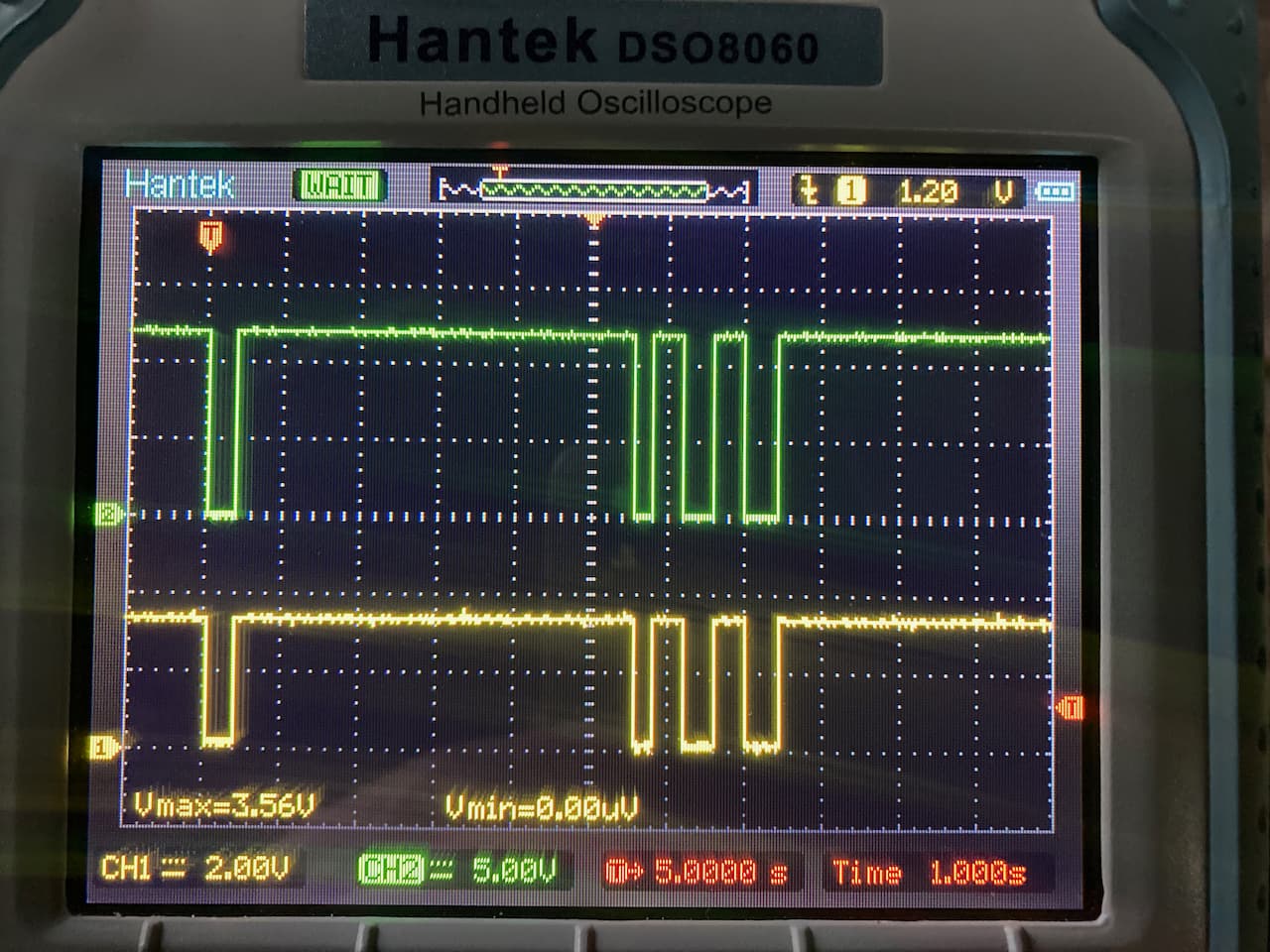
Currently, I’m trying to initialize the ISO9141 communication. The serial monitor shows the following messages: ISO9141 initializing... First 3 Bytes: 55 8 8 Other Bytes: F7 Initialization Successful !!
The issue is that while the serial monitor indicates a successful initialization, the byte sequence seems unexpected to me. I’m not sure if I’m missing a step in the timing, configuration, or if there’s a problem with the hardware itself.
I've already tried various resistor values, changed the timing delays, and swapped out components, but I’m still getting the same result.
If anyone has experience with ISO9141-2 or any tips on why I’m seeing this particular sequence, your input would be greatly appreciated!

#include <AltSoftSerial.h>
AltSoftSerial K_Serial;
// Define Pins
#define K_line_RX 8
#define K_line_TX 9
#define Led 13
// Define Delays
#define READ_DELAY 5
#define REQUEST_DELAY 500
int SPEED, RPM, THROTTLE, COOLANT_TEMP, INTAKE_TEMP, VOLTAGE;
bool KLineStatus = false;
static unsigned long lastReqestTime = 0;
uint8_t result = 0;
uint8_t resultBuffer[20];
uint8_t initBuffer[20];
int dtcs = 0;
char dtc_Byte_1, dtc_Byte_2;
String dtcBuffer[20];
const byte read_DTCs[4] = { 0x68, 0x6A, 0xF1, 0x03 }; // Read Troubleshoot Codes
const byte clear_DTCs[4] = { 0x68, 0x6A, 0xF1, 0x04 }; // Clear Troubleshoot Codes
// Request data bytes for slow init (ISO9141 and KWP slow)
const byte read_PIDs_20[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x00 }; // Read suported PIDs 0-20
const byte read_PIDs_40[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x20 }; // Read suported PIDs 20-40
const byte read_PIDs_60[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x40 }; // Read suported PIDs 40-60
const byte read_PIDs_80[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x60 }; // Read suported PIDs 60-80
const byte read_PIDs_A0[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x80 }; // Read suported PIDs 80-A0
const byte read_PIDs_C0[5] = { 0x68, 0x6A, 0xF1, 0x01, 0xA0 }; // Read suported PIDs A0-C0
const byte read_PIDs_E0[5] = { 0x68, 0x6A, 0xF1, 0x01, 0xC0 }; // Read suported PIDs A0-E0
const byte speed_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x0D };
const byte rpm_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x0C };
const byte throttle_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x11 };
const byte coolant_temp_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x05 };
const byte intake_temp_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x0F };
const byte voltage_obd[5] = { 0x68, 0x6A, 0xF1, 0x01, 0x42 };
void setup() {
Serial.begin(9600);
pinMode(K_line_RX, INPUT_PULLUP);
pinMode(K_line_TX, OUTPUT);
pinMode(Led, OUTPUT);
}
void loop() {
if (KLineStatus == false) {
if (millis() - lastReqestTime >= 5000) {
Serial.println("Initialising ISO9141...");
bool init_success = init_ISO9141();
if (init_success) {
KLineStatus = true;
digitalWrite(Led, HIGH);
Serial.println("Init Success !!");
read_DTC();
}
lastReqestTime = millis();
}
} else {
read_K();
}
}
void read_K() {
//------------------------------------------------------ get speed
writeData(speed_obd, sizeof(speed_obd));
readData();
if (resultBuffer[10] == 0x0D) {
SPEED = resultBuffer[11];
Serial.print("Speed: ");
Serial.println(SPEED);
}
//------------------------------------------------------ get rpm
writeData(rpm_obd, sizeof(rpm_obd));
readData();
if (resultBuffer[10] == 0x0C) {
RPM = (resultBuffer[11] * 256 + resultBuffer[12]) / 4;
Serial.print("RPM: ");
Serial.println(RPM);
}
//------------------------------------------------------ get throttle
writeData(throttle_obd, sizeof(throttle_obd));
readData();
if (resultBuffer[10] == 0X11) {
THROTTLE = resultBuffer[11] * 100 / 255;
Serial.print("Throttle: ");
Serial.println(THROTTLE);
}
//------------------------------------------------------ get Coolant temp
writeData(coolant_temp_obd, sizeof(coolant_temp_obd));
readData();
if (resultBuffer[10] == 0x05) {
COOLANT_TEMP = resultBuffer[11] - 40;
Serial.print("Coolant Temp: ");
Serial.println(COOLANT_TEMP);
}
//------------------------------------------------------ get Intake temp
writeData(intake_temp_obd, sizeof(intake_temp_obd));
readData();
if (resultBuffer[10] == 0x0F) {
INTAKE_TEMP = resultBuffer[11] - 40;
Serial.print("Intake Temp: ");
Serial.println(INTAKE_TEMP);
}
Serial.println();
}
void read_DTC() {
writeData(read_DTCs, sizeof(read_DTCs));
delay(REQUEST_DELAY);
result = K_Serial.available();
if (result > 0) {
// Serial.print("Buffer: ");
for (int i = 0; i < result; i++) {
resultBuffer[i] = K_Serial.read();
delay(READ_DELAY);
// Serial.print(resultBuffer[i], HEX);
// Serial.print(" ");
}
// Serial.println();
int length = result - 10;
for (int i = 0; i < length; i++) {
int index1 = 9 + i * 2;
int index2 = 9 + i * 2 + 1;
dtc_Byte_1 = resultBuffer[index1];
dtc_Byte_2 = resultBuffer[index2];
delay(READ_DELAY);
if (dtc_Byte_1 == 0 && dtc_Byte_2 == 0) {
if (i == 0) {
Serial.println("Not Found Errors !");
} else {
Serial.println("Errors ended !");
}
Serial.println();
return;
} else {
// Serial.print("Errors: "), Serial.print(dtc_Byte_1, HEX), Serial.print(" "), Serial.println(dtc_Byte_2, HEX);
decodeDTC(dtc_Byte_1, dtc_Byte_2);
}
}
}
}
void clear_DTC() {
writeData(clear_DTCs, sizeof(clear_DTCs));
}
bool init_ISO9141() {
K_Serial.end();
digitalWrite(K_line_TX, HIGH), delay(300);
digitalWrite(K_line_TX, LOW), delay(200);
digitalWrite(K_line_TX, HIGH), delay(400);
digitalWrite(K_line_TX, LOW), delay(400);
digitalWrite(K_line_TX, HIGH), delay(400);
digitalWrite(K_line_TX, LOW), delay(400);
digitalWrite(K_line_TX, HIGH), delay(200);
K_Serial.begin(10400);
delay(REQUEST_DELAY);
result = K_Serial.available();
if (result > 0) {
Serial.print("First 3 Bytes: ");
for (int i = 0; i < result; i++) {
initBuffer[i] = K_Serial.read();
delay(READ_DELAY);
Serial.print(initBuffer[i], HEX);
Serial.print(" ");
}
Serial.println();
if (initBuffer[0] == 0x55) {
delay(30);
K_Serial.write(~initBuffer[2]); //0xF7
delay(50);
result = K_Serial.available();
if (result > 0) {
Serial.print("Other Bytes: ");
for (int i = 0; i < result; i++) {
initBuffer[i] = K_Serial.read();
delay(READ_DELAY);
Serial.print(initBuffer[i], HEX);
Serial.print(" ");
}
Serial.println();
return true;
}
}
}
return false;
}
void writeData(const byte data[], int length) {
byte checksum = calculateChecksum(data, length);
K_Serial.write(data, length);
K_Serial.write(checksum);
}
void readData() {
delay(REQUEST_DELAY);
result = K_Serial.available();
if (result > 0) {
for (int i = 0; i < result; i++) {
resultBuffer[i] = K_Serial.read();
delay(READ_DELAY);
}
}
}
byte calculateChecksum(byte data[], int length) {
byte checksum = 0;
for (int i = 0; i < length; i++) {
checksum += data[i];
}
return checksum % 256;
}
void decodeDTC(char input_byte1, char input_byte2) {
String ErrorCode = "";
const static char type_lookup[4] = { 'P', 'C', 'B', 'U' };
const static char digit_lookup[16] = { '0', '1', '2', '3', '4', '5', '6', '7', '8', '9', 'A', 'B', 'C', 'D', 'E', 'F' };
ErrorCode += type_lookup[(input_byte1 >> 6) & 0b11];
ErrorCode += digit_lookup[(input_byte1 >> 4) & 0b11];
ErrorCode += digit_lookup[input_byte1 & 0b1111];
ErrorCode += digit_lookup[input_byte2 >> 4];
ErrorCode += digit_lookup[input_byte2 & 0b1111];
dtcBuffer[dtcs] = ErrorCode;
Serial.print("Error Code: ");
Serial.println(dtcBuffer[dtcs]);
dtcs++;
}
This is the output I’m getting on the serial monitor using basic code on Arduino Uno. I’ve also encountered these errors when using a different code. Önceden bReceived Data: C1 33 F1 81 66
Initializing...
Writing Data...
Received Data: C1 33 F1 81 66
Initializing...
Writing Data...
Received Data: C1 33 F1 81 66
Initializing...içimlendirilmiş metin