Hello everybody,
I was trying to have a quick and dirty go at detecting pitch, roll and yaw (just to have a look of what to expect before running AHRS type of filters using libraries tha I am sure can do a much better job than I could possibly do).
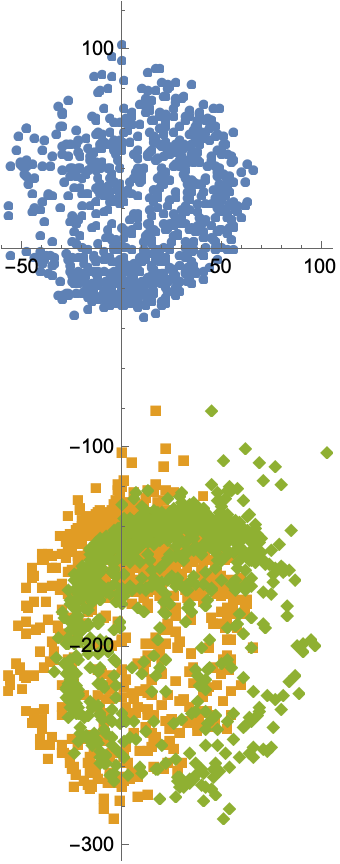
I am using a Nano BLE Sense Rev 2, and I have no problem in calculating pitch and roll and fusing them with a complimentary filter. The problem is the yaw. I have calibrated the magnetometer both for hard as well as for soft iron (not yet the gyro though, but the problem I have goes definitely beyond calibration).
Now, when I try to tilt-correct the yaw measurement I get no correction at all, and the value fluctuates quite a lot. I suspect it has something to do with the orientation of the two sensors, but I was not able to pin down the problem changing signs of the correction formulas.
I leave the sketch below just in case you can spot something that so far has escaped me.
#include <Arduino_BMI270_BMM150.h>
/* global static variables */
static float A_LOW_PASS_PARAMETER = 0.90;
static float THETA_FUSION_PARAMETER = 0.90;
static float PHI_FUSION_PARAMETER = 0.90;
static float M_LOW_PASS_PARAMETER = 0.80;
/* calibration */
static float A_THETA_CALIBRATION = 0; /*-0.23;*/
static float A_PHI_CALIBRATION = 0; /*0.65;*/
static float GYRO_X_CALIBRATION = -1.23;
static float GYRO_Y_CALIBRATION = -0.08;
static float FREE_FALL_THRESHOLD = 0.2;
/* magnetometer */
static float M_BIAS_X = 2.48053;
static float M_BIAS_Y = 30.67026;
static float M_BIAS_Z = -199.227955;
static float SI_M_11 = 0.878218;
static float SI_M_12 = -0.014747;
static float SI_M_13 = -0.027250;
static float SI_M_21 = -0.014747;
static float SI_M_22 = 0.807423;
static float SI_M_23 = -0.033193;
static float SI_M_31 = -0.027250;
static float SI_M_32 = -0.033193;
static float SI_M_33 = 0.661987;
/* global variables */
unsigned long t_old;
bool FREE_FALL = 0;
/* accelerometer variables */
float a_x, a_y, a_z;
float a_theta_M, a_phi_M;
float a_theta_Fold = 0;
float a_phi_Fold = 0;
float a_theta_Fnew, a_phi_Fnew;
float a_magnitude;
/* gyroscope variables */
float g_x, g_y, g_z;
float g_theta_M = 0;
float g_phi_M = 0;
float dt;
float g_magnitude;
/* fused variables */
float theta_F = 0;
float phi_F = 0;
/* magnetometer variables */
float m_x, m_y, m_z;
float cal_m_x, cal_m_y, cal_m_z;
float m_x_prj, m_y_prj;
float m_psi_M1,m_psi_M2,m_psi_M3;
float m_psi_Fnew;
float m_psi_Fold = 0;
float theta_F_rad, phi_F_rad;
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.println("Started");
t_old = millis();
IMU_init_and_setup();
}
void IMU_init_and_setup() {
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
Serial.print("Accelerometer sample rate = ");
Serial.print(IMU.accelerationSampleRate());
Serial.println(" Hz");
Serial.println("Acceleration in G's");
Serial.println();
Serial.print("Gyroscope sample rate = ");
Serial.print(IMU.gyroscopeSampleRate());
Serial.println(" Hz");
Serial.println("Gyroscope in degrees/second");
Serial.println();
Serial.print("Magnetic field sample rate = ");
Serial.print(IMU.magneticFieldSampleRate());
Serial.println(" Hz");
Serial.println("Magnetic Field in uT");
}
void loop() {
/* accelerometer data */
if (IMU.accelerationAvailable()) {
IMU.readAcceleration(a_x, a_y, a_z);
a_magnitude = sqrt(a_x * a_x + a_y * a_y + a_z * a_z);
/* Approximating tilt via the accelerometer */
/* pitch */
a_theta_M = atan2(a_x, a_z)/2/3.141592654*360 - A_THETA_CALIBRATION;
/* roll */
a_phi_M = atan2(a_y, a_z)/2/3.141592654*360 - A_PHI_CALIBRATION;
/* Apply a low-pass filter to suppress noise */
a_phi_Fnew = A_LOW_PASS_PARAMETER * a_phi_Fold + (1 - A_LOW_PASS_PARAMETER) * a_phi_M;
a_theta_Fnew = A_LOW_PASS_PARAMETER * a_theta_Fold + (1 - A_LOW_PASS_PARAMETER) * a_theta_M;
a_phi_Fold = a_phi_Fnew;
a_theta_Fold = a_theta_Fnew;
}
/* gyroscope data */
if (IMU.gyroscopeAvailable()) {
IMU.readGyroscope(g_x, g_y, g_z);
/* correct for calibration */
g_x = g_x - GYRO_X_CALIBRATION;
g_y = g_y - GYRO_Y_CALIBRATION;
/* define time elapsed */
dt = (millis() - t_old)/1000.;
t_old = millis();
/* Approximating tilt via the gyroscope */
/* pitch */
g_theta_M = g_theta_M + g_y * dt;
/* roll */
g_phi_M = g_phi_M - g_x * dt;
g_magnitude = sqrt(g_x * g_x + g_y * g_y + g_z * g_z);
}
/* acclerometer and gyroscope fusion through a complimentary filter */
/* pitch */
theta_F = THETA_FUSION_PARAMETER * (theta_F + g_y * dt) + (1 - THETA_FUSION_PARAMETER) * a_theta_M;
/* roll */
phi_F = PHI_FUSION_PARAMETER * (phi_F - g_x * dt) + (1 - PHI_FUSION_PARAMETER) * a_phi_M;
theta_F_rad = theta_F / 360 * 2 * 3.14159265;
phi_F_rad = phi_F / 360 * 2 * 3.14159265;
/* magnetometer data */
if (IMU.magneticFieldAvailable()) {
IMU.readMagneticField(m_x, m_y, m_z);
cal_m_x = SI_M_11 * (m_x - M_BIAS_X) + SI_M_12 * (m_y - M_BIAS_Y) + SI_M_13 * (m_z - M_BIAS_Z);
cal_m_y = SI_M_21 * (m_x - M_BIAS_X) + SI_M_22 * (m_y - M_BIAS_Y) + SI_M_23 * (m_z - M_BIAS_Z);
cal_m_z = SI_M_31 * (m_x - M_BIAS_X) + SI_M_32 * (m_y - M_BIAS_Y) + SI_M_33 * (m_z - M_BIAS_Z);
m_x_prj = cal_m_x * cos(theta_F_rad) - cal_m_y * sin(phi_F_rad) * sin(theta_F_rad) + cal_m_z * cos(phi_F_rad) * sin(theta_F_rad);
m_y_prj = cal_m_y * cos(phi_F_rad) + cal_m_z * sin(phi_F_rad);
/* yaw/heading */
m_psi_M1 = atan2(m_y_prj, m_x_prj)/2/3.141592654*360;
/*m_psi_M2 = atan2(cal_m_x, cal_m_z)/2/3.141592654*360;
m_psi_M3 = atan2(cal_m_y, cal_m_z)/2/3.141592654*360;*/
/* Apply a low pass filter to suppress noise */
/*m_psi_Fnew = M_LOW_PASS_PARAMETER * m_psi_Fold + (1 - M_LOW_PASS_PARAMETER) * m_psi_M;
m_psi_Fold = m_psi_Fnew;*/
}
if(a_magnitude > 0 && a_magnitude < FREE_FALL_THRESHOLD) {
FREE_FALL = 1;
} else {
FREE_FALL = 0;
}
/* magnetometer calibration */
/*
Serial.print("{");
Serial.print(m_x); Serial.print(",");
Serial.print(m_y); Serial.print(",");
Serial.print(m_z); Serial.println("},");
*/
/* magnetometer calibration check */
/*
Serial.print("{");
Serial.print(cal_m_x); Serial.print(",");
Serial.print(cal_m_y); Serial.print(",");
Serial.print(cal_m_z); Serial.println("},");
*/
Serial.print(a_theta_M);
Serial.print('\t');
Serial.print(a_phi_M);
Serial.print('\t');
Serial.print(a_theta_Fnew);
Serial.print('\t');
Serial.print(a_phi_Fnew);
Serial.print('\t');
Serial.print(theta_F);
Serial.print('\t');
Serial.print(phi_F);
Serial.print('\t');
Serial.println(m_psi_M1);
/*Serial.print('\t');
Serial.print(a_y);
Serial.print('\t');
Serial.println(a_z);
Serial.print('\t');
Serial.print(g_x);
Serial.print('\t');
Serial.print(g_y);
Serial.print('\t');
Serial.print('\t');
Serial.println(m_psi_M1);*/
delay(100);
}