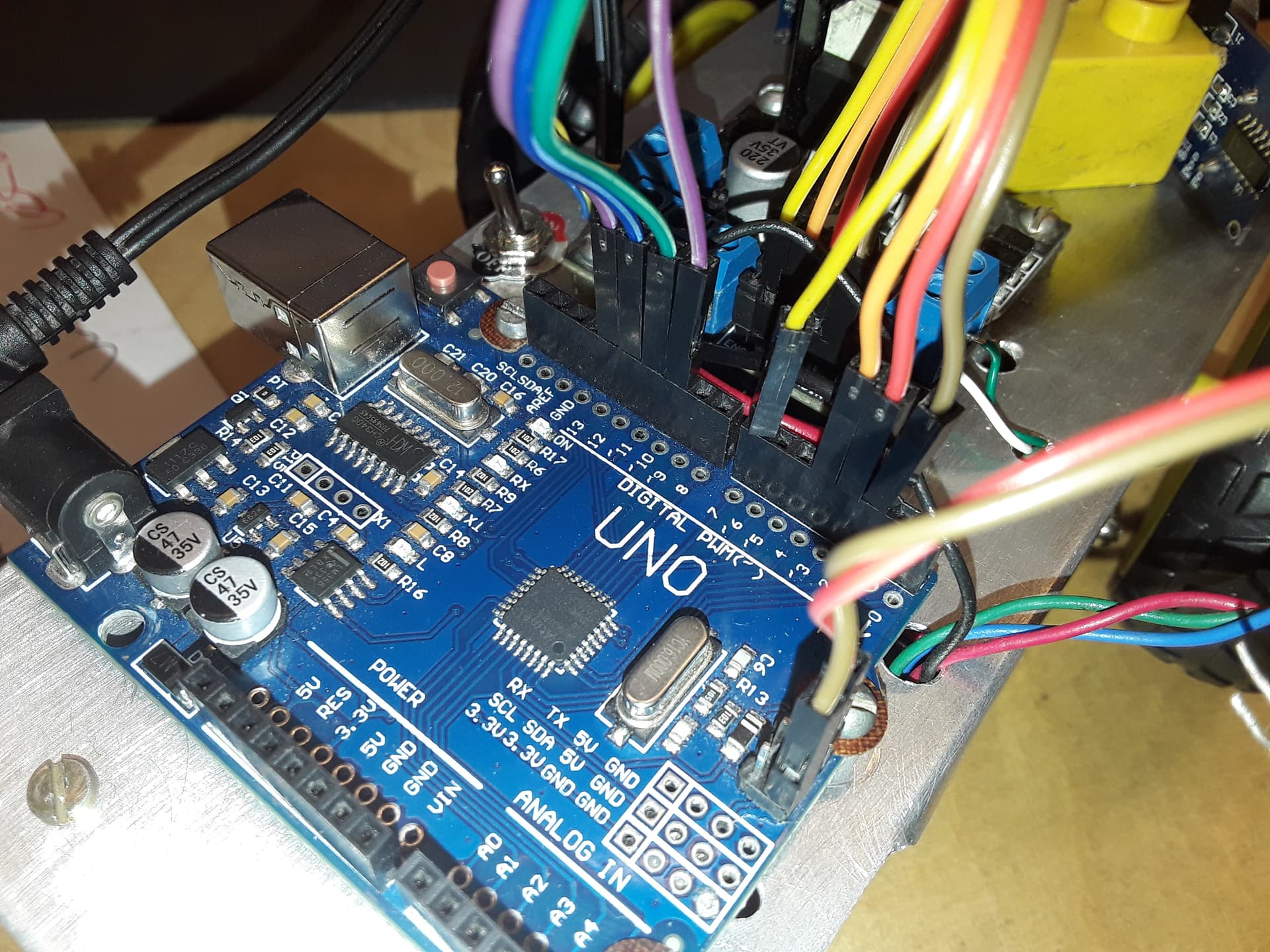
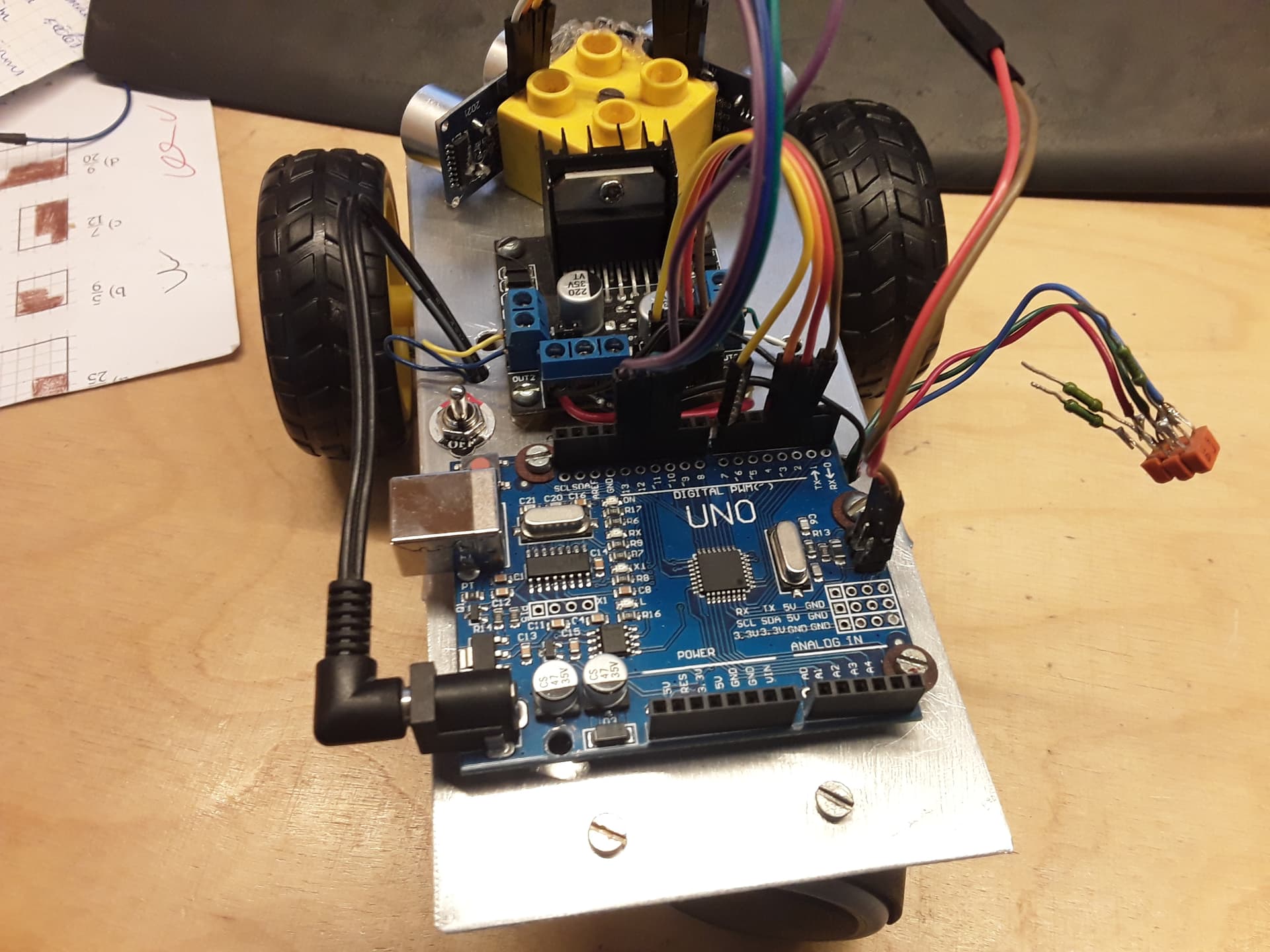
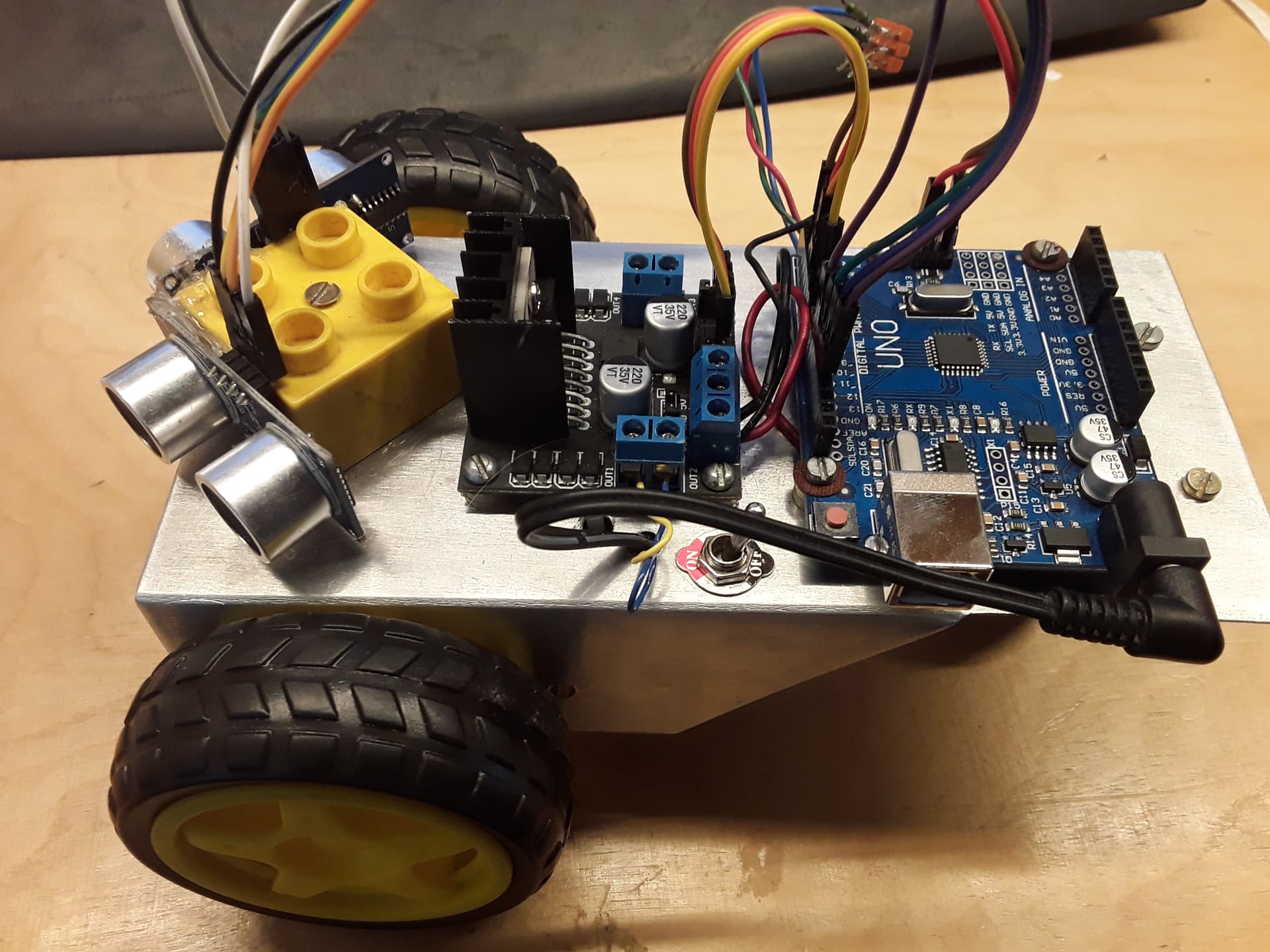
hello ! i have made a robot with 2x hc-sr04 sensors and a l289n connected to a uno board
it's has to avoid obstacles . But it runs olny for a while and then stops sending data
my code is
#include <Arduino.h>
#include <Wire.h>
#include <SoftwareSerial.h>
double angle_rad = PI/180.0;
double angle_deg = 180.0/PI;
float getDistance(int trig,int echo){
pinMode(trig,OUTPUT);
digitalWrite(trig,LOW);
delayMicroseconds(2);
digitalWrite(trig,HIGH);
delayMicroseconds(10);
digitalWrite(trig,LOW);
pinMode(echo, INPUT);
return pulseIn(echo,HIGH,30000)/58.0;
}
void setup(){
_delay(5);
pinMode(2,OUTPUT);
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(7,OUTPUT);
}
void loop(){
if(((getDistance(11,10)) < (15 )) || ((getDistance(13,12)) < (15))){
if((getDistance(11,10)) < (15 )){
digitalWrite(2,0);
digitalWrite(3,1);
digitalWrite(4,1);
digitalWrite(7,0);
}
if((getDistance(13,12)) < (15)){
digitalWrite(2,1);
digitalWrite(3,0);
digitalWrite(4,0);
digitalWrite(7,1);
}
}else{
digitalWrite(2,1);
digitalWrite(3,0);
digitalWrite(4,1);
digitalWrite(7,0);
}
_loop();
}
void _delay(float seconds){
long endTime = millis() + seconds * 1000;
while(millis() < endTime)_loop();
}
void _loop(){
}
i'dot realy understad code can sobody plese help