it does not move when detected. although it moved back then
Have you written code and uploaded it to Uno?
yes
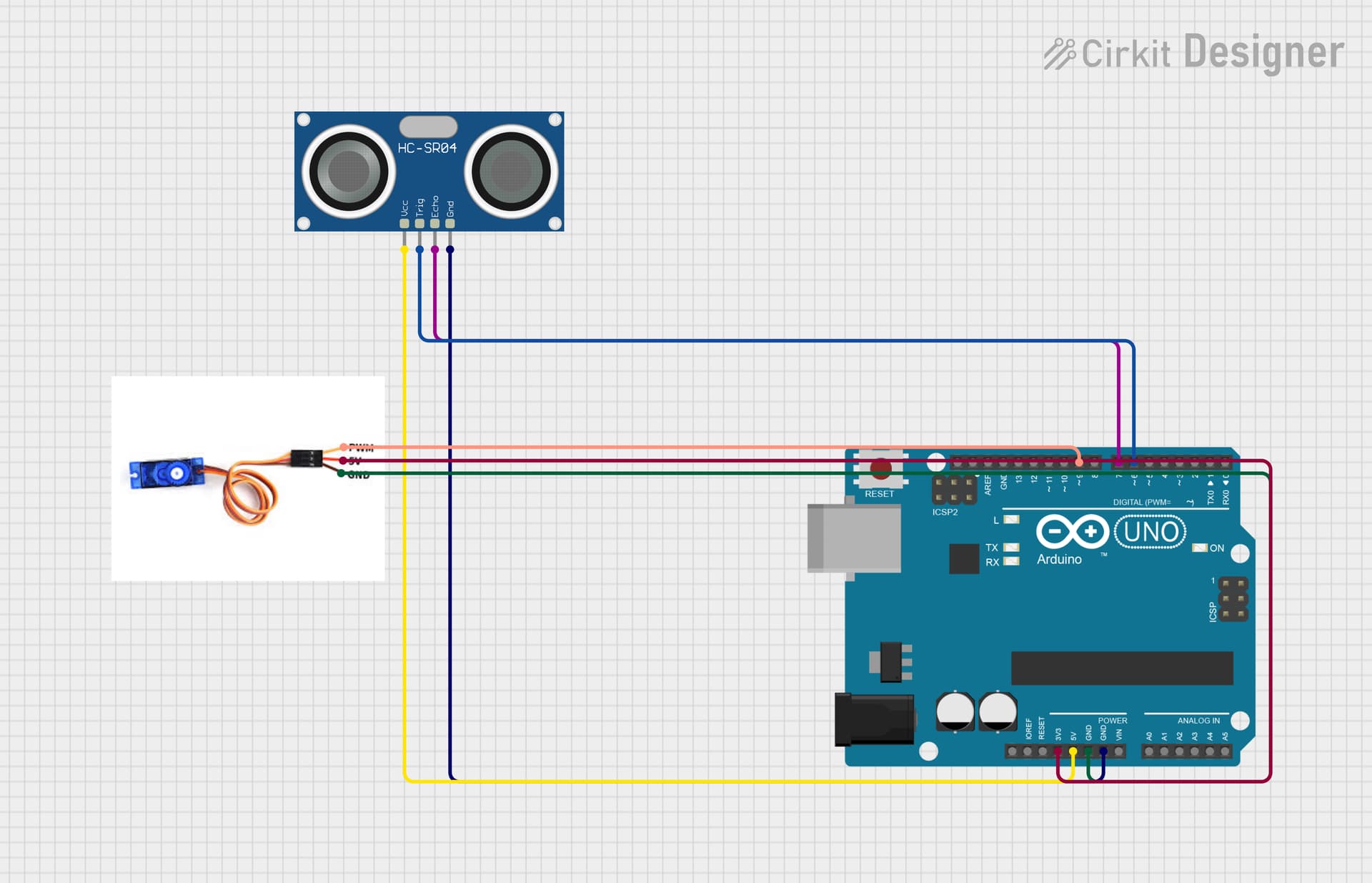
SERVO VIA ULTRASONIC
#include <Servo.h>
// constants won't change
const int TRIG_PIN = 9; // Arduino pin connected to Ultrasonic Sensor's TRIG pin
const int ECHO_PIN = 10; // Arduino pin connected to Ultrasonic Sensor's ECHO pin
const int SERVO_PIN = 5; // Arduino pin connected to Servo Motor's pin
const int DISTANCE_THRESHOLD = 10; // centimeters
Servo servo; // create servo object to control a servo
// variables will change:
float duration_us, distance_cm;
void setup() {
Serial.begin (9600); // initialize serial port
pinMode(TRIG_PIN, OUTPUT); // set arduino pin to output mode
pinMode(ECHO_PIN, INPUT); // set arduino pin to input mode
pinMode(13, OUTPUT); // set arduino pin to input mode
servo.attach(SERVO_PIN); // attaches the servo on pin 5 to the servo object
servo.write(0);
}
void loop() {
// generate 10-microsecond pulse to TRIG pin
digitalWrite(TRIG_PIN, HIGH);
digitalWrite(13, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// measure duration of pulse from ECHO pin
duration_us = pulseIn(ECHO_PIN, HIGH);
// calculate the distance
distance_cm = 0.017 * duration_us;
if (distance_cm < DISTANCE_THRESHOLD)
servo.write(180); // rotate servo motor to 90 degree
else
servo.write(0); // rotate servo motor to 0 degree
// print the value to Serial Monitor
Serial.print("distance: ");
Serial.print(distance_cm);
Serial.println(" cm");
delay(500);
}
Try this:
//SERVO VIA ULTRASONIC
#include <Servo.h>
// constants won't change
const int TRIG_PIN = 9; // Arduino pin connected to Ultrasonic Sensor's TRIG pin
const int ECHO_PIN = 10; // Arduino pin connected to Ultrasonic Sensor's ECHO pin
const int SERVO_PIN = 5; // Arduino pin connected to Servo Motor's pin
const int DISTANCE_THRESHOLD = 10; // centimeters
Servo servo; // create servo object to control a servo
// variables will change:
unsigned long duration_us;
float distance_cm;
void setup() {
Serial.begin (9600); // initialize serial port
pinMode(TRIG_PIN, OUTPUT); // set arduino pin to output mode
digitalWrite(TRIG_PIN, LOW); // set LOW
pinMode(ECHO_PIN, INPUT); // set arduino pin to input mode
//pinMode(13, OUTPUT); // set arduino pin to output
servo.attach(SERVO_PIN); // attaches the servo on pin 5 to the servo object
servo.write(0);
}
void loop() {
// generate 10-microsecond pulse to TRIG pin
digitalWrite(TRIG_PIN, HIGH);
//digitalWrite(13, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
// measure duration of pulse from ECHO pin
duration_us = pulseIn(ECHO_PIN, HIGH);
// calculate the distance
distance_cm = 0.0172 * (float) duration_us;
//***************************************************************
// if distance is less then DISTANCE_THRESHOLD move to 90 degrees
// else set to 0 degrees
//***************************************************************
if (distance_cm < DISTANCE_THRESHOLD)
servo.write(90); // rotate servo motor to 90 degree
else
servo.write(0); // rotate servo motor to 0 degree
// print the value to Serial Monitor
Serial.print("distance: ");
Serial.print(distance_cm);
Serial.println(" cm");
delay(500);
}