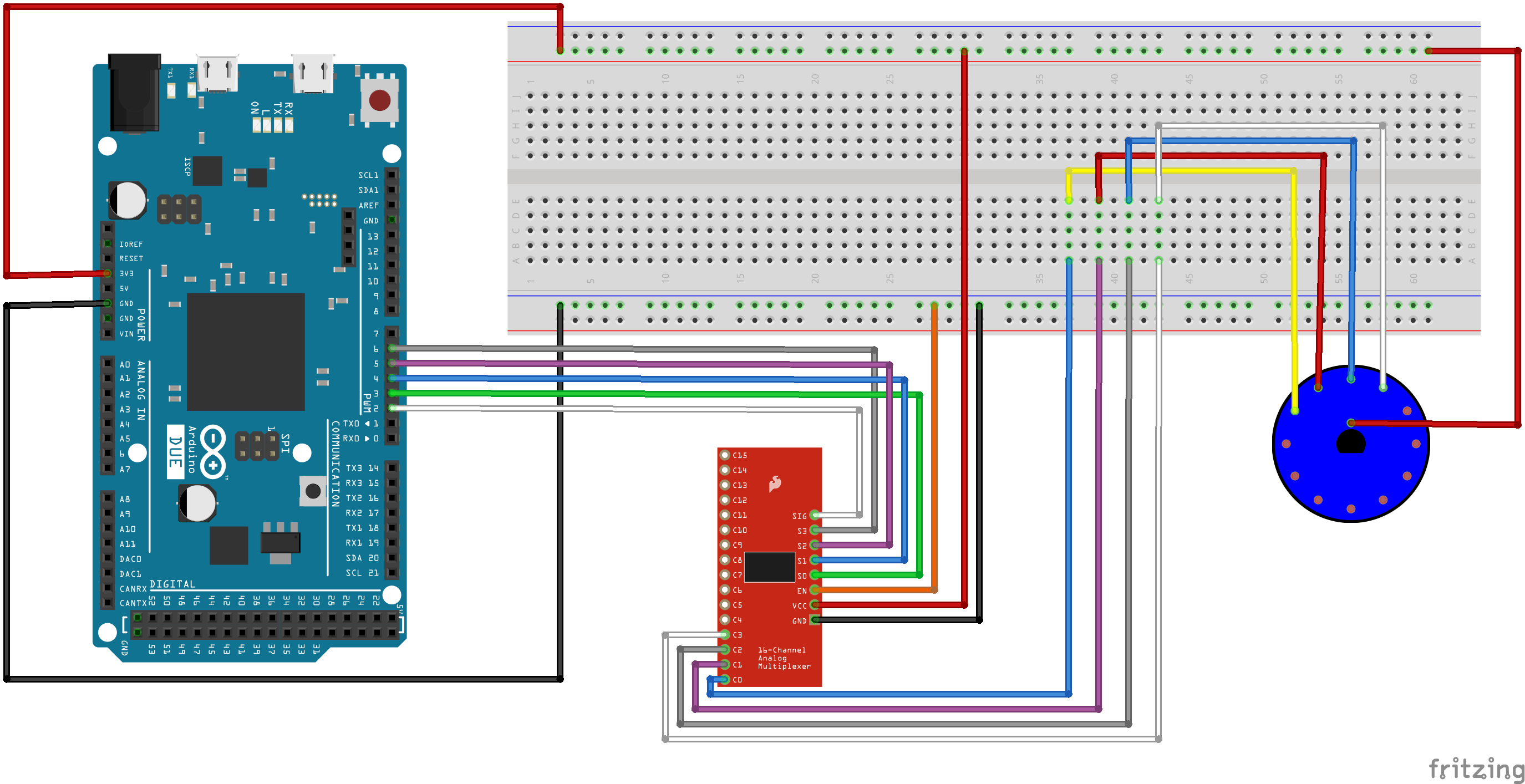
Hi there - I'm building a flight-sim button box that will need several rotary switches (not encoders) and other buttons and am trying to use the CD74HC4067 (no-name boards from Amazon UK at the moment) to reduce the input count on to the Due.
I have been using the often-quoted basic sketch (as reproduced here) to test the basics - but it is apparent that the inputs are erratic and cannot be trusted. So far I've tried two of the five 4067s I have to hand.
Searching this forum suggested possibly that all of the C0-15 inputs on the 4067 might need a grounding capacitor? Is that where I'm going wrong?
int s0 = 3;
int s1 = 4;
int s2 = 5;
int s3 = 6;
//Mux in "SIG" pin
int SIG_pin = 2;
void setup() {
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
pinMode(SIG_pin, INPUT);
digitalWrite(s0, LOW);
digitalWrite(s1, LOW);
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
Serial.begin(9600);
}
void loop() {
//Loop through and read all 16 values
for (int i = 0; i < 16; i++) {
Serial.print("Value at channel ");
Serial.print(i);
Serial.print("is : ");
Serial.println(readMux(i));
delay(1000);
}
}
int readMux(int channel) {
int controlPin[] = { s0, s1, s2, s3 };
int muxChannel[16][4] = {
{ 0, 0, 0, 0 }, //channel 0
{ 1, 0, 0, 0 }, //channel 1
{ 0, 1, 0, 0 }, //channel 2
{ 1, 1, 0, 0 }, //channel 3
{ 0, 0, 1, 0 }, //channel 4
{ 1, 0, 1, 0 }, //channel 5
{ 0, 1, 1, 0 }, //channel 6
{ 1, 1, 1, 0 }, //channel 7
{ 0, 0, 0, 1 }, //channel 8
{ 1, 0, 0, 1 }, //channel 9
{ 0, 1, 0, 1 }, //channel 10
{ 1, 1, 0, 1 }, //channel 11
{ 0, 0, 1, 1 }, //channel 12
{ 1, 0, 1, 1 }, //channel 13
{ 0, 1, 1, 1 }, //channel 14
{ 1, 1, 1, 1 } //channel 15
};
//loop through the 4 sig
for (int i = 0; i < 4; i++) {
digitalWrite(controlPin[i], muxChannel[channel][i]);
}
//read the value at the SIG pin
int val = digitalRead(SIG_pin);
//return the value
return val;
}
TIA!
