Can someone please help me. I cant properly control my rc car (im following a tutorial on YT). I did everything on the tutorial, i dont think im missing something but yeah i cant control it properly.
This is how i wire it and as you can see i didn't solder it yet because i want to make sure it works first.

The bluetooth rc contoller i used:
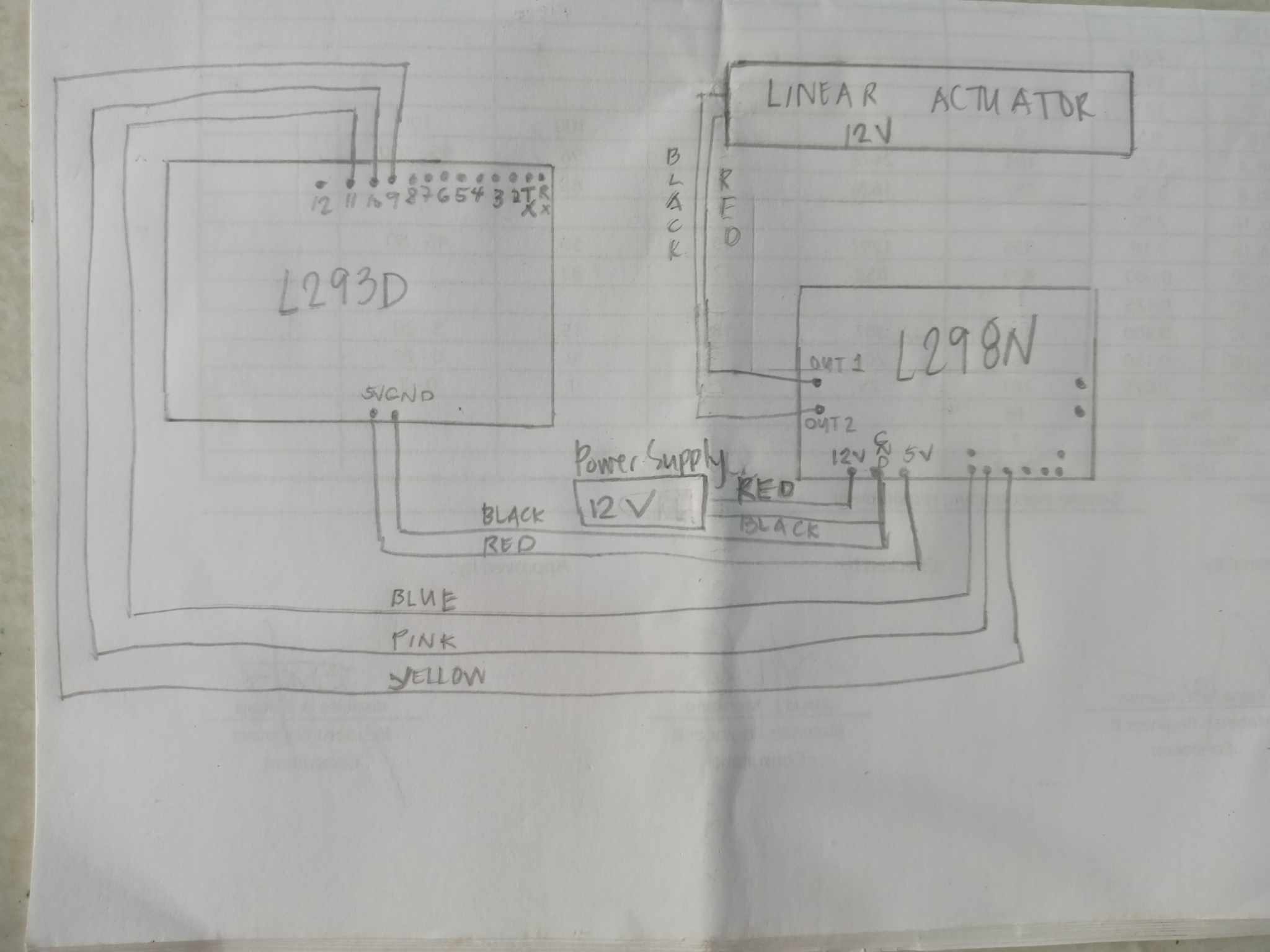
Schematic diagram:

is this connection possible?(i use the same l293d above)
The code:
#include <AFMotor.h>
AF_DCMotor motor1(1); // Motor 1 connected to M1 port of L293D
AF_DCMotor motor2(2); // Motor 2 connected to M2 port of L293D
AF_DCMotor motor3(3); // Motor 3 connected to M3 port of L293D
AF_DCMotor motor4(4); // Motor 4 connected to M4 port of L293D
int linearActuatorEnablePin = 11; // L298N Enable pin
int linearActuatorInput1 = 10; // L298N Input 1
int linearActuatorInput2 = 9; // L298N Input 2
int linearActuatorDelay = 3000; // Delay before linear actuator movement (in milliseconds)
int linearActuatorMoveTime = 10000; // Time for linear actuator to extend and retract (in milliseconds)
unsigned long lastMoveTime = 0;
void setup() {
Serial.begin(9600); // Initialize serial communication
motor1.setSpeed(255); // Set motor speed (0-255)
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
pinMode(linearActuatorEnablePin, OUTPUT);
pinMode(linearActuatorInput1, OUTPUT);
pinMode(linearActuatorInput2, OUTPUT);
}
void loop() {
if (Serial.available() > 0) {
char command = Serial.read();
executeCommand(command);
}
// Check if the car is not moving for 3 seconds
if ((millis() - lastMoveTime) > linearActuatorDelay) {
// Extend and retract the linear actuator after 10 seconds
if ((millis() - lastMoveTime) > (linearActuatorDelay + linearActuatorMoveTime)) {
moveLinearActuator();
lastMoveTime = millis();
}
}
}
void executeCommand(char command) {
switch (command) {
case 'F':
moveForward();
break;
case 'B':
moveBackward();
break;
case 'L':
turnLeft();
break;
case 'R':
turnRight();
break;
case 'S':
stopMoving();
break;
}
}
void moveForward() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
lastMoveTime = millis();
}
void moveBackward() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
lastMoveTime = millis();
}
void turnLeft() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
lastMoveTime = millis();
}
void turnRight() {
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
lastMoveTime = millis();
}
void stopMoving() {
motor1.setSpeed(0);
motor2.setSpeed(0);
motor3.setSpeed(0);
motor4.setSpeed(0);
}
void moveLinearActuator() {
digitalWrite(linearActuatorEnablePin, HIGH);
digitalWrite(linearActuatorInput1, HIGH);
digitalWrite(linearActuatorInput2, LOW);
delay(linearActuatorMoveTime);
digitalWrite(linearActuatorEnablePin, LOW);
}