INFO: If somebody is able to talk in German with me, please welcome! (I prefer German, but English is okay too - I hope that's not an problem to anybody?)
At first: I was looking in lots of Forens and Google with the result of 1000 of Tons different explains and howto's but didn't match to my issue, even here. That's why I opened a new Thread.
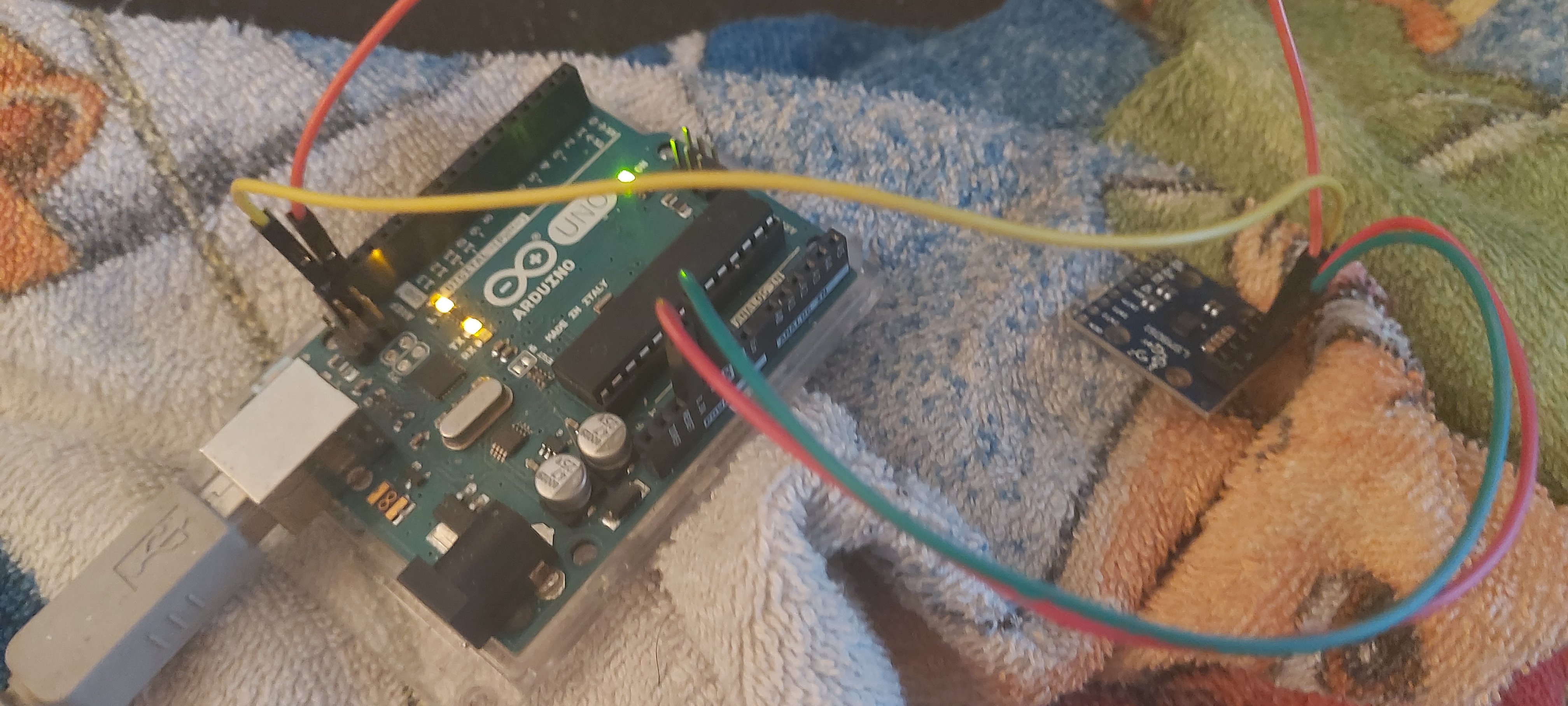
I try to build a Gimbal with an LSM9DS1 3-axis gyroscope (9DoF) (Workes pretty fine), my Arduino Uno and 3 NEMA23 Bipolar Steppers. Many said BLDC is better but I would like to use what's allready here. I also try to get parts from electronic scrap like Resistors and many more (Condenser, etc.)
well, also I have some Pololu 8825 & 4988 DRV's which are stacked of an GRBL Motorshield Board (one more Pololu as reserve and not sticked). The GRBL Board has integrated an ATMEGA Chipset and is Arduino compatible (never tried to change FW or something else on ths Board : ) The Board was used for my CNC-Mill in the past. The Board supply 12V 2,8A each Chan of Stepper.
So, here the major question: Can I use my Parts to build a Gimbal with Stepper within these possibilities?
The next big problem is to communicate with the Controller. I need a solution for I2C because the Sensor is supplied by Arduino with 3.3 Volts and using SCL & SDA Pins until now. SPI is not really possible, right?
I'm not as good in coding as I would (or wish), so it would be kindly to explain it to me very gently or help me out
At this point I will say thank you and looking forward for any Help - Cheers!
mrino:
I try to build a Gimbal with an LSM9DS1 3-axis gyroscope (9DoF) (Workes pretty fine), my Arduino Uno and 3 NEMA23 Bipolar Steppers. Many said BLDC is better but I would like to use what's allready here. I also try to get parts from electronic scrap like Resistors and many more (Condenser, etc.)
well, also I have some Pololu 8825 & 4988 DRV's which are stacked of an GRBL Motorshield Board (one more Pololu as reserve and not sticked). The GRBL Board has integrated an ATMEGA Chipset and is Arduino compatible (never tried to change FW or something else on ths Board : ) The Board was used for my CNC-Mill in the past. The Board supply 12V 2,8A each Chan of Stepper.
I'm not sure what the problem is. In the first of these paragraphs you say it works pretty fine.
So what exactly do you want help with?
If you can communicate with I2C it seems likely that SPI should also work - if you have access to the SPI pins. However if I2C works OK why not use it? You have not told us what the communication is with - is it another Arduino that you are programming?
Please make you images visible in your Posts so we don't have to download them. See this Simple Image Posting Guide
Also, please note that there is a German language section of the Forum if you would prefer to use it.
Well, I meant the gyro... within the tests with the Uno it works fine (so far). I read about small measuring differences with the IMU which would be to compensate through programcode, but... it's not my problem yet, ya now?
I ask for help to build a Camera Crane on serval axis - that's my mark.
Every Board works fine. But I got message from Zwieblum (German Section) that the GBRL is not programmable for my purposes.
For me it's important to know what's possible. I know f.e. that using SPI is without a voltagebridge for the 3.3Volt IMU not possible. SPI uses 5 Volts, i2c up to 3.3Volts. My Breakout IMU runs with 3.3 Volts.
That's my problem actually - I need to know what's to do, to connect my Arduino Uno with the IMU on i2c and Pololu Motordrivers. The coding is the big questin at the end.