I'm looking to build an H-Bridge using power MOSFETs, and found many different designs online. Most designs have four inputs, one for each power MOSFET, which need to be precisely controlled, because if the "wrong" two are activated, it'll cause a short circuit. E.g. Tutorial - Experiment 7 - Bi-directional Control Of Motors And The H-Bridge
Then I found this design which uses more components, but only has requires inputs: http://www.cadvision.com/blanchas/hexfet/np-s.htm . In the diagram, only inputs A and B are required; C and D are not connected in the default design, according to the notes at the bottom. However, even this design doesn't allow both A and B to be active, or else it causes a short.
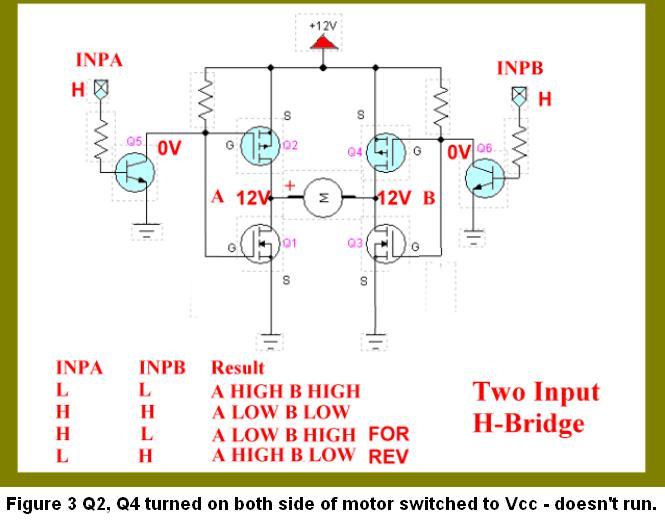
I also found found this design which uses only six transistors and four resistors: MOSFET H-Bridge Motor Control . If you scroll down to Figure 3, this seems to suggest that even if both inputs are active, nothing bad will happen. And the circuit appears to be quite simple.
Are there any substantial disadvantages to using the third option here? It seems to cover all bases: simple and inexpensive to build, can handle as much current as the MOSFETs are rated for (which is normally higher than the integrated H-bridge circuits), and won't blow up if I make a programming mistake.
No, forget that circuit, use high-low MOSFET driver chips with automatic dead-time generation,
and 4 nFETs - simple, more robust, much higher PWM speeds can be used as MOSFET drivers
are far more capable of driving a capacitive load. All n-FETs means lower on resistance for your
money too.
I mean chips like the IRS2004, FAN7388, HIP4081, but there are thousands of them and many offer
useful protection features like under-voltage lock-out.
BTW that circuit clearly will blow up on a programming mistake - did you notice the "not allowed"
row in the state table?
JimboZA:
For a user named anarchy, that might actually be the objective
Haha fair enough, but that's not the case here. I've just been using that screen name since I was young, and just haven't bothered thinking of something else.
And I saw the "not allowed", but wasn't that on the second example, not the third?
I'll check out those chips; I'm looking to make something that can handle at least 10A at 12V, but if I needed to handle more current, I was thinking of putting multiple MOSFETs in parallel.
anarchy_1024:
And I saw the "not allowed", but wasn't that on the second example, not the third?
You're right, there are no "not allowed" states in circuit 3, but a problem arises as the drive signal to the MOSFETs swings through the centre - both the upper and lower MOSFET on each side will be turned partly 'on' for an instant, causing a partial short. (Both gates on each side will have 6V applied with a 12V supply.)
As Mark says, MOSFET drivers with high-side and low-side outputs w/ 4 N-channel MOSFETs are the best answer.
The truth table for that circuit is wrong, too. Points A and B would be in the same state as their inputs, not inverted as shown.
ie If INPA was high, Q5 would be 'on', pulling the gate of MOSFET Q2 low and therefore switching it on, pulling motor connection A high. Same goes for the other side.
(The description underneath is correct - only the truth table is wrong.)
I agree with OldSteve about this design but we've discussed this before and I think we both came to the conclusion that the amount of time that both the N-channel and the P-channel device are both on and the degree to which they are "partially on" does qualify as a full blown shoot through where both devices are ON FULL and are damaged as a result. I have an H-bridge that uses a similar design where both devices are driven with 12 V signals from a TC4427 mosfet driver chip and I can drive a stepper motor at full speed with no problem. I was unable to measure any current through both devices at the same time. I can't say for certain but my gut feeling is that this design is ok up to a certain power level and then a more robust design is needed which incorporates the shoot-through protection and dead-time delay. I think it is wrong to just dismiss it outright since it clearly works for many applications and would probably work for the majority of hobbyist projects for which members post on this forum. By the same token, a true shoot-through protected High power H-bridge is probably not needed for 80% of the posts requesting help for H-bridge circuits, which are typically small robots. If someone is building a power chair or electric ATV or anything with serious power concerns then obviously this is not the circuit for them. To dismiss it outright is simply not accurate. I think it should be stated that it is ok for low power applications.