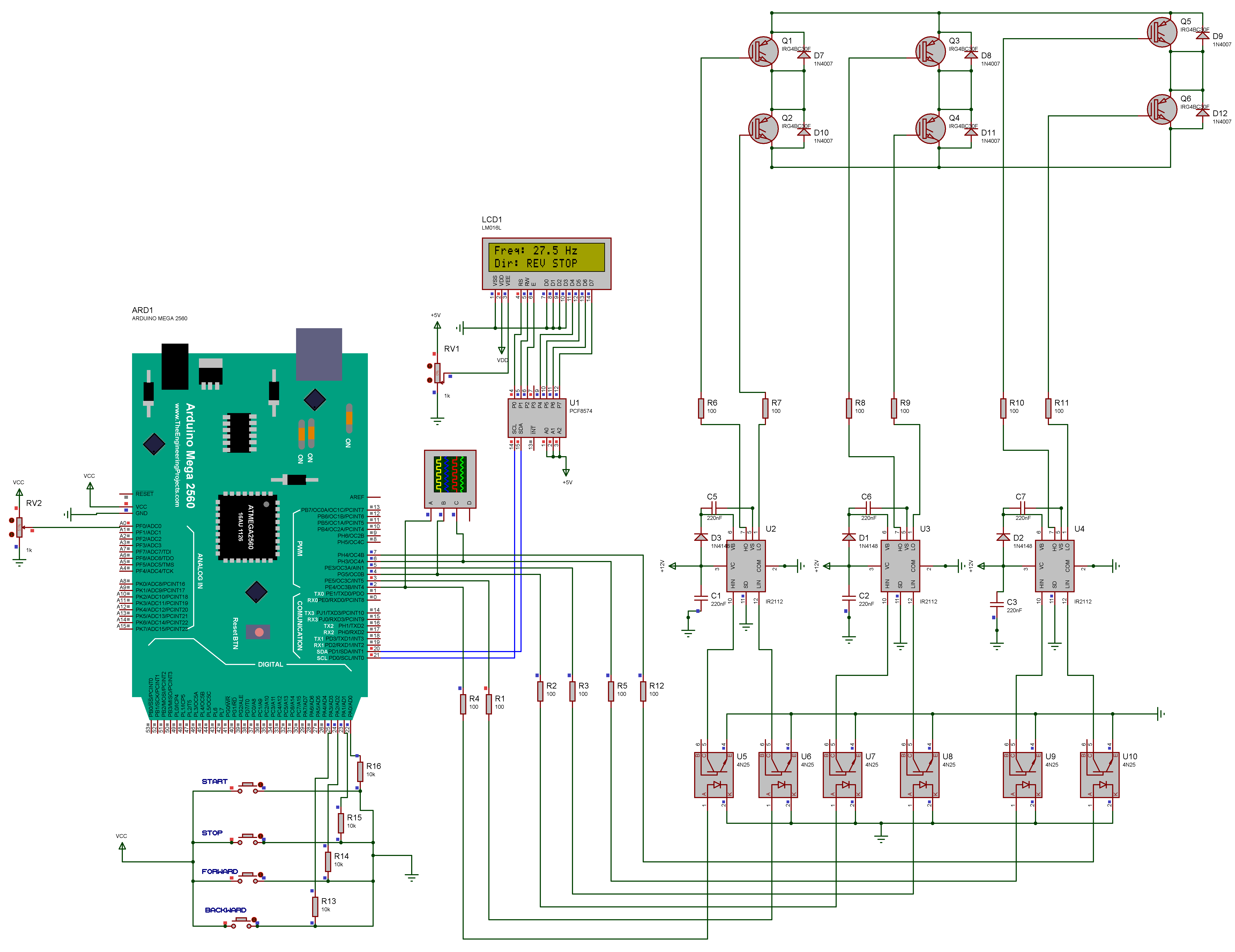
Hello , so i design this circuit about vfd , ![]() wrote the code and the buttons are not working (only the potontionmeter) so i used a line in the code "running=true;" so the signs works ,
wrote the code and the buttons are not working (only the potontionmeter) so i used a line in the code "running=true;" so the signs works ,
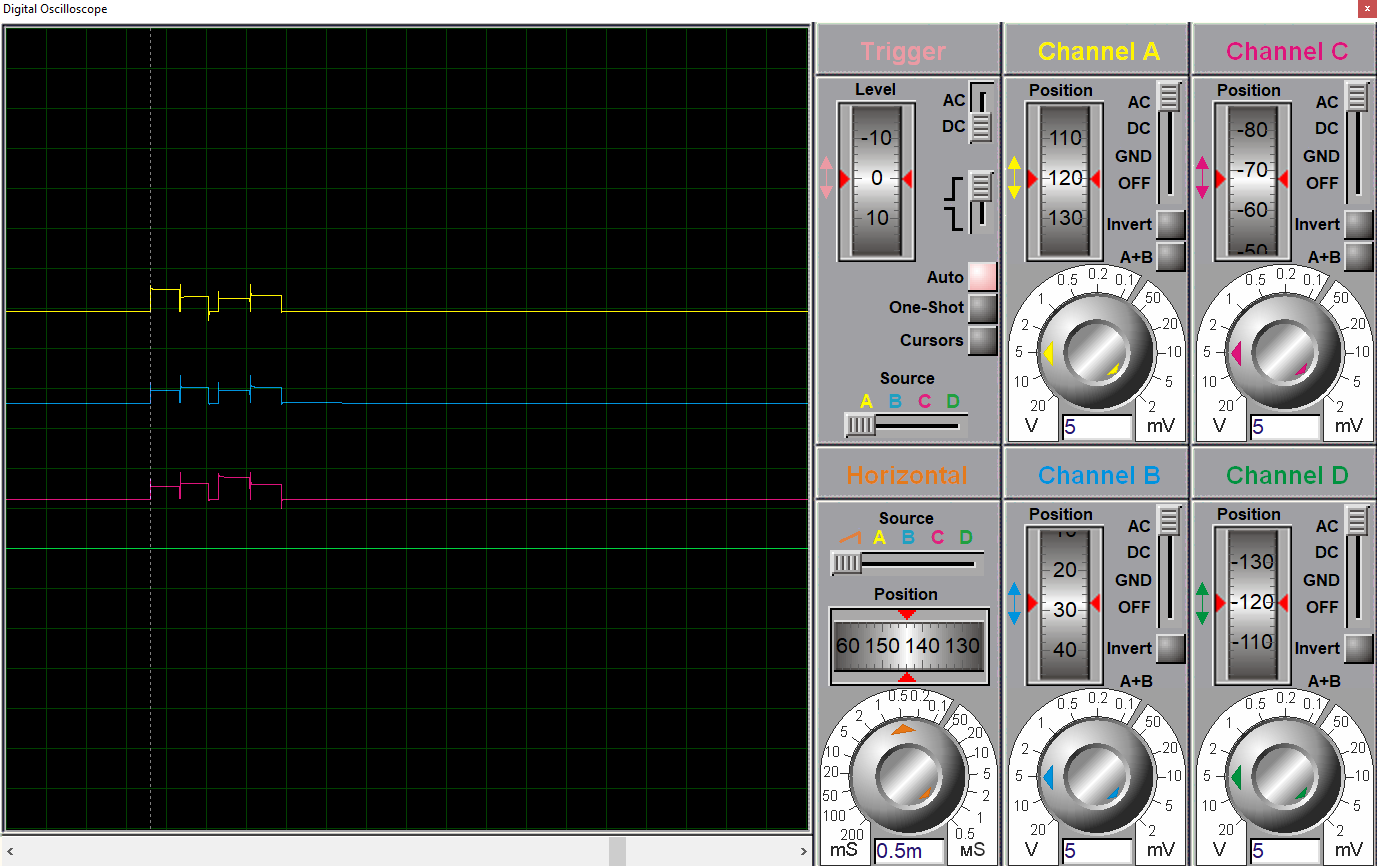
now there is the oscilloscope linked to the inverter and that's the sign i'm not sure its the right sign because i added a leds to make sure it works and to make it clear to you the pwm sign are work
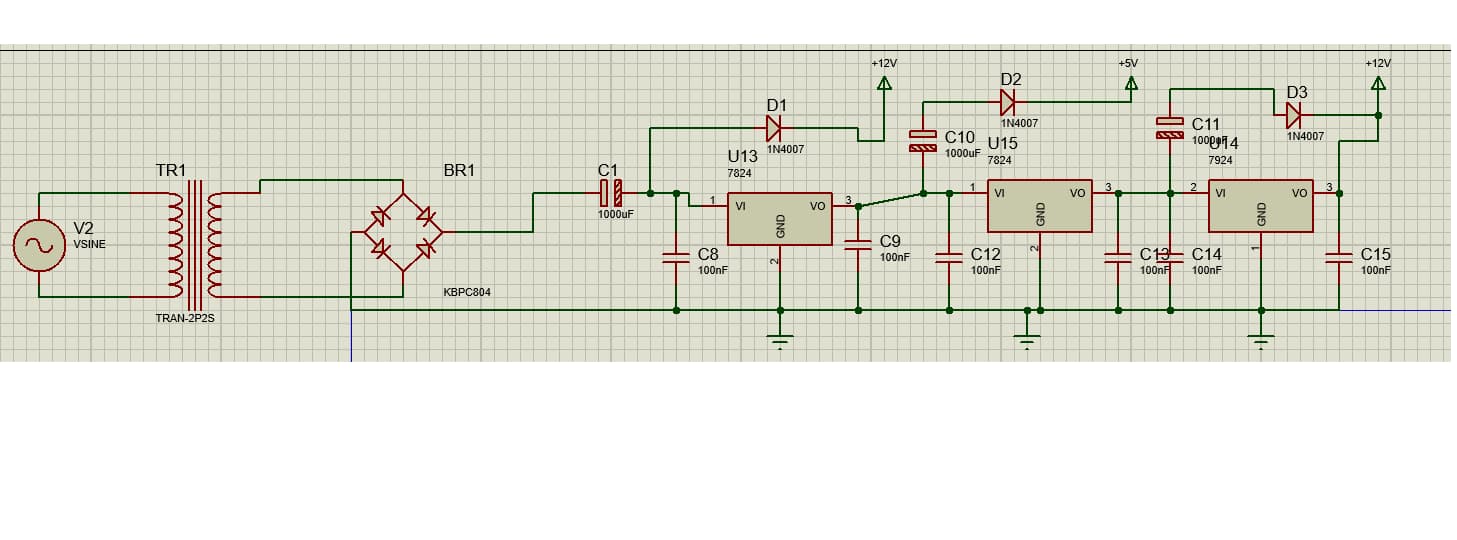
![]() and my final question is i know i must add the ac source and voltage regulator ... etc , is it right and if it is how i will link it to the circuit
and my final question is i know i must add the ac source and voltage regulator ... etc , is it right and if it is how i will link it to the circuit
and this is the code because i cant share the ide file here
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <math.h>
// LCD at I2C address 0x27, 16 columns, 2 rows
LiquidCrystal_I2C lcd(0x27, 16, 2);
// --------- Pin Definitions ----------
#define A_H 2
#define A_L 3
#define B_H 4
#define B_L 5
#define C_H 6
#define C_L 7
#define START_BTN 22
#define STOP_BTN 23
#define FORWARD_BTN 24
#define BACKWARD_BTN 25
#define POT_PIN A0
// --------- Constants ----------
const int TABLE_SIZE = 100;
float sineTable[TABLE_SIZE];
const float BASE_FREQ = 50.0; // 50 Hz base
const int DEAD_TIME_US = 3;
const unsigned long DEBOUNCE_DELAY = 50;
const unsigned long LCD_UPDATE_INTERVAL = 200;
// --------- State Variables ----------
bool running = false;
bool directionForward = true;
unsigned long lastMicros = 0;
int stepIndex = 0;
float currentFreq = BASE_FREQ;
unsigned long stepTime = 0;
unsigned long lastDebounceTime = 0;
unsigned long lastLcdUpdate = 0;
// --------- Setup ---------
void setup() {
// Setup PWM output pins
pinMode(A_H, OUTPUT);
pinMode(A_L, OUTPUT);
pinMode(B_H, OUTPUT);
pinMode(B_L, OUTPUT);
pinMode(C_H, OUTPUT);
pinMode(C_L, OUTPUT);
// Setup input buttons
pinMode(START_BTN, INPUT_PULLUP);
pinMode(STOP_BTN, INPUT_PULLUP);
pinMode(FORWARD_BTN, INPUT_PULLUP);
pinMode(BACKWARD_BTN, INPUT_PULLUP);
// Generate sine table
for (int i = 0; i < TABLE_SIZE; i++) {
sineTable[i] = (sin(2 * PI * i / TABLE_SIZE) + 1.0) / 2.0;
}
// Setup LCD
lcd.init();
lcd.backlight();
lcd.setCursor(0, 0);
lcd.print("3-Phase SPWM VFD");
delay(1000);
lcd.clear();
}
// --------- Button Debouncing Function ---------
void readButtons() {
if ((millis() - lastDebounceTime) > DEBOUNCE_DELAY) {
if (digitalRead(START_BTN) == LOW) {
running = true;
lastDebounceTime = millis();
}
if (digitalRead(STOP_BTN) == LOW) {
running = false;
lastDebounceTime = millis();
}
if (digitalRead(FORWARD_BTN) == LOW) {
directionForward = true;
lastDebounceTime = millis();
}
if (digitalRead(BACKWARD_BTN) == LOW) {
directionForward = false;
lastDebounceTime = millis();
}
}
}
// --------- Display Update ---------
void updateDisplay() {
if (millis() - lastLcdUpdate > LCD_UPDATE_INTERVAL) {
lastLcdUpdate = millis();
lcd.setCursor(0, 0);
lcd.print("Freq: ");
lcd.print(currentFreq, 1);
lcd.print(" Hz ");
lcd.setCursor(0, 1);
lcd.print("Dir: ");
lcd.print(directionForward ? "FWD " : "REV ");
lcd.print(running ? "RUN " : "STOP");
lcd.print(" ");
}
}
// --------- Speed Control ---------
void updateSpeed() {
int potValue = analogRead(POT_PIN);
float speedScale = map(potValue, 0, 1023, 10, TABLE_SIZE) / float(TABLE_SIZE);
currentFreq = BASE_FREQ * speedScale;
stepTime = 1000000.0 / (currentFreq * TABLE_SIZE);
}
// --------- Dead-Time PWM Output ---------
void writeSPWM(float duty, int pinHigh, int pinLow) {
int onTime = duty * stepTime;
int offTime = stepTime - onTime;
if (onTime > DEAD_TIME_US) {
digitalWrite(pinHigh, HIGH);
delayMicroseconds(onTime - DEAD_TIME_US);
digitalWrite(pinHigh, LOW);
} else {
delayMicroseconds(onTime);
}
delayMicroseconds(DEAD_TIME_US);
if (offTime > DEAD_TIME_US) {
digitalWrite(pinLow, HIGH);
delayMicroseconds(offTime - DEAD_TIME_US);
digitalWrite(pinLow, LOW);
} else {
delayMicroseconds(offTime);
}
}
// --------- SPWM Generation ---------
void generateSPWM() {
unsigned long now = micros();
if (now - lastMicros >= stepTime) {
lastMicros = now;
int indexA = stepIndex;
int indexB = (stepIndex + TABLE_SIZE / 3) % TABLE_SIZE;
int indexC = (stepIndex + 2 * TABLE_SIZE / 3) % TABLE_SIZE;
float dutyA = sineTable[indexA];
float dutyB = sineTable[indexB];
float dutyC = sineTable[indexC];
if (running) {
writeSPWM(dutyA, A_H, A_L);
if (directionForward) {
writeSPWM(dutyB, B_H, B_L);
writeSPWM(dutyC, C_H, C_L);
} else {
writeSPWM(dutyC, B_H, B_L);
writeSPWM(dutyB, C_H, C_L);
}
stepIndex = (stepIndex + 1) % TABLE_SIZE;
} else {
digitalWrite(A_H, LOW); digitalWrite(A_L, LOW);
digitalWrite(B_H, LOW); digitalWrite(B_L, LOW);
digitalWrite(C_H, LOW); digitalWrite(C_L, LOW);
}
}
}
// --------- Main Loop ---------
void loop() {
running=true;
readButtons();
updateSpeed();
updateDisplay();
generateSPWM();
}