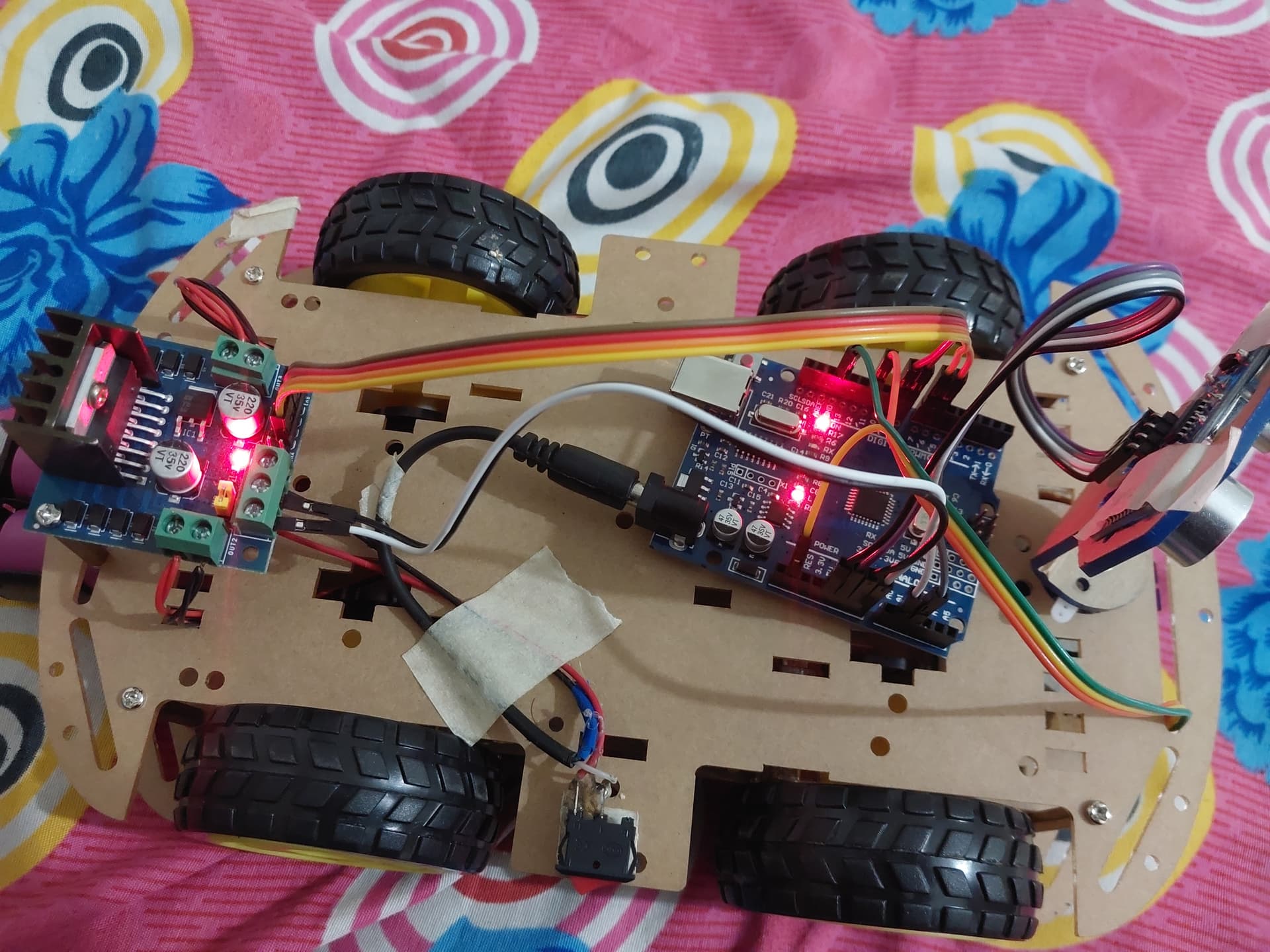
For below problem, only servo motor (carrying Ultrasonic sensor) is rotating. Wheel motors are not getting actuated. Could you please suggest/guide me to make it work as per title.
Reference I have followed is:
Pre-requisite checks which I have made and are successful are:
- all wheel motors are working fine. Direction of rotation of all the wheels is checked and it is fine.
- Before this code, I have checked thorough functioning of L298N Motor Driver Module. It is working fine. I built small codes for the rotations and those are fine.
- Ultrasonic sensor is detecting obstacle
Mentioning Connections below:
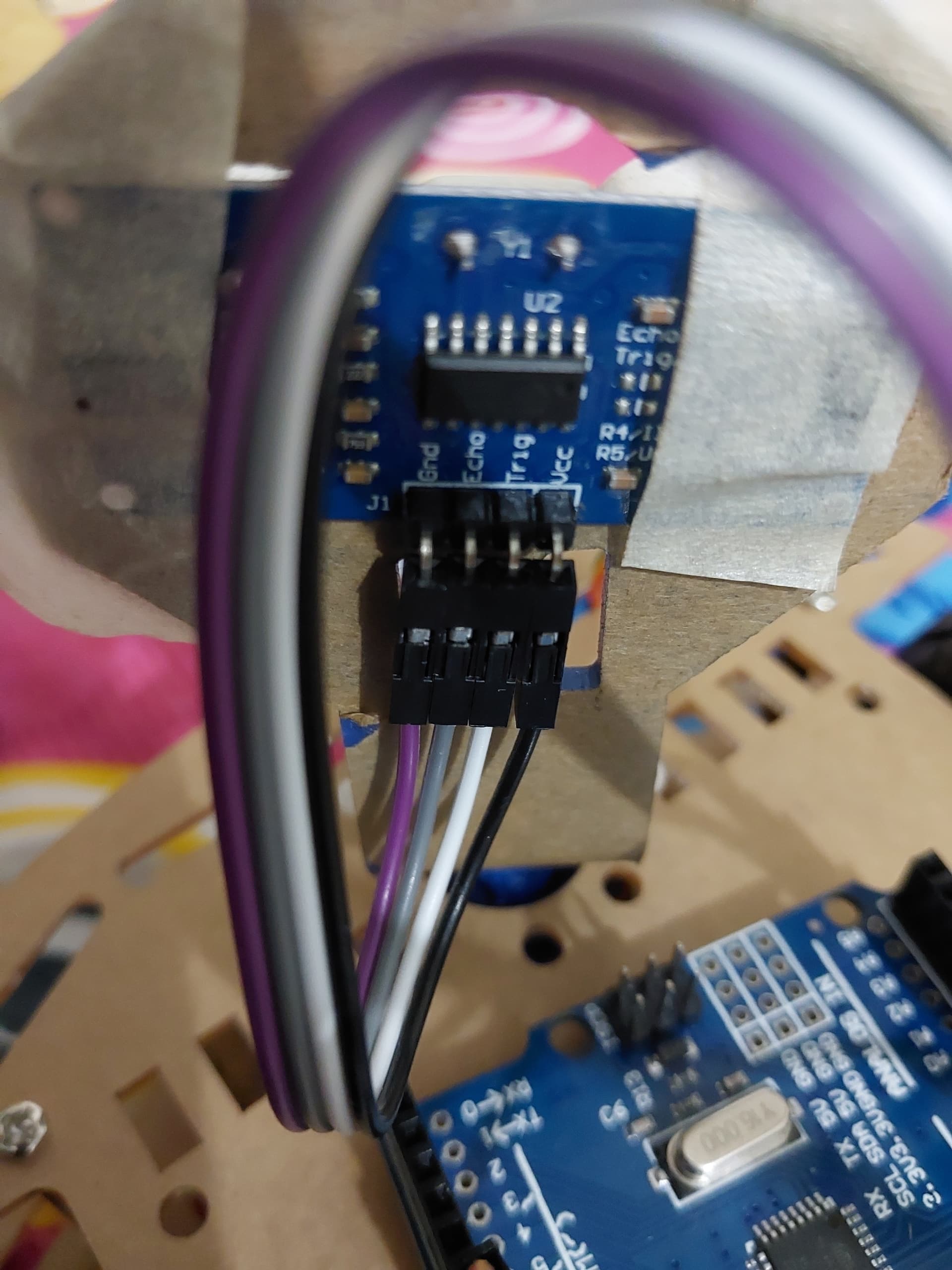
HC-SR04 Ultrasonic Sensor:
VCC to 5V
Trig to A1 (Analog Input)
Echo to A2 (Analog Input)
GND to GND
SG90 Micro Servo Motor:
Signal (S) to Arduino Pin 11
VCC to 5V
GND to GND
L298 Motor Driver Module:
Input1 to 7
Input2 to 6
Input3 to 9
Input4 to 8
Below mentioned is the code.
#include <Servo.h> //Servo motor library. This is standard library
#include <NewPing.h> //Ultrasonic sensor function library. You must install this library
//our L298N control pins
const int LeftMotorForward = 9;
const int LeftMotorBackward = 8;
const int RightMotorForward = 7;
const int RightMotorBackward = 6;
//sensor pins
#define trig_pin A1 //analog input 1
#define echo_pin A2 //analog input 2
#define maximum_distance 200
boolean goesForward = false;
int distance = 100;
NewPing sonar(trig_pin, echo_pin, maximum_distance); //sensor function
Servo servo_motor; //our servo name
void setup() {
pinMode(RightMotorForward, OUTPUT);
pinMode(LeftMotorForward, OUTPUT);
pinMode(LeftMotorBackward, OUTPUT);
pinMode(RightMotorBackward, OUTPUT);
servo_motor.attach(11); //our servo pin
servo_motor.write(85);
delay(2000);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
}
void loop() {
int distanceRight = 0;
int distanceLeft = 0;
delay(50);
if (distance <= 20) {
moveStop();
delay(300);
moveBackward();
delay(400);
moveStop();
delay(300);
distanceRight = lookRight();
delay(300);
distanceLeft = lookLeft();
delay(300);
if (distance >= distanceLeft) {
turnRight();
moveStop();
} else {
turnLeft();
moveStop();
}
} else {
moveForward();
}
distance = readPing();
}
int lookRight() {
servo_motor.write(50);
delay(500);
int distance = readPing();
delay(100);
servo_motor.write(85);
return distance;
}
int lookLeft() {
servo_motor.write(170);
delay(500);
int distance = readPing();
delay(100);
servo_motor.write(85);
return distance;
delay(100);
}
int readPing() {
delay(70);
int cm = sonar.ping_cm();
if (cm == 0) {
cm = 250;
}
return cm;
}
void moveStop() {
digitalWrite(RightMotorForward, LOW);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(RightMotorBackward, LOW);
digitalWrite(LeftMotorBackward, LOW);
}
void moveForward() {
if (!goesForward) {
goesForward = true;
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(RightMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
digitalWrite(RightMotorBackward, LOW);
}
}
void moveBackward() {
goesForward = false;
digitalWrite(LeftMotorBackward, HIGH);
digitalWrite(RightMotorBackward, HIGH);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(RightMotorForward, LOW);
}
void turnRight() {
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(RightMotorBackward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
digitalWrite(RightMotorForward, LOW);
delay(500);
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(RightMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
digitalWrite(RightMotorBackward, LOW);
}
void turnLeft() {
digitalWrite(LeftMotorBackward, HIGH);
digitalWrite(RightMotorForward, HIGH);
digitalWrite(LeftMotorForward, LOW);
digitalWrite(RightMotorBackward, LOW);
delay(500);
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(RightMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
digitalWrite(RightMotorBackward, LOW);
}