Hola gente soy nuevo en el foro de Arduino y les quería preguntar si me ayuda con este proyecto
quiero hacer lo que dice el titulo el proyecto esta echo para Arduino micro pero se que también se lo puede hacer en el pro micro la idea seria volver a hacer la foto del esquema con las conexiones para la pro micro y seguramente también seria cambiar el código porque hay pines que en la pro micro no existen hago todo esto porque en mi país no se consiguen las Arduino micro .
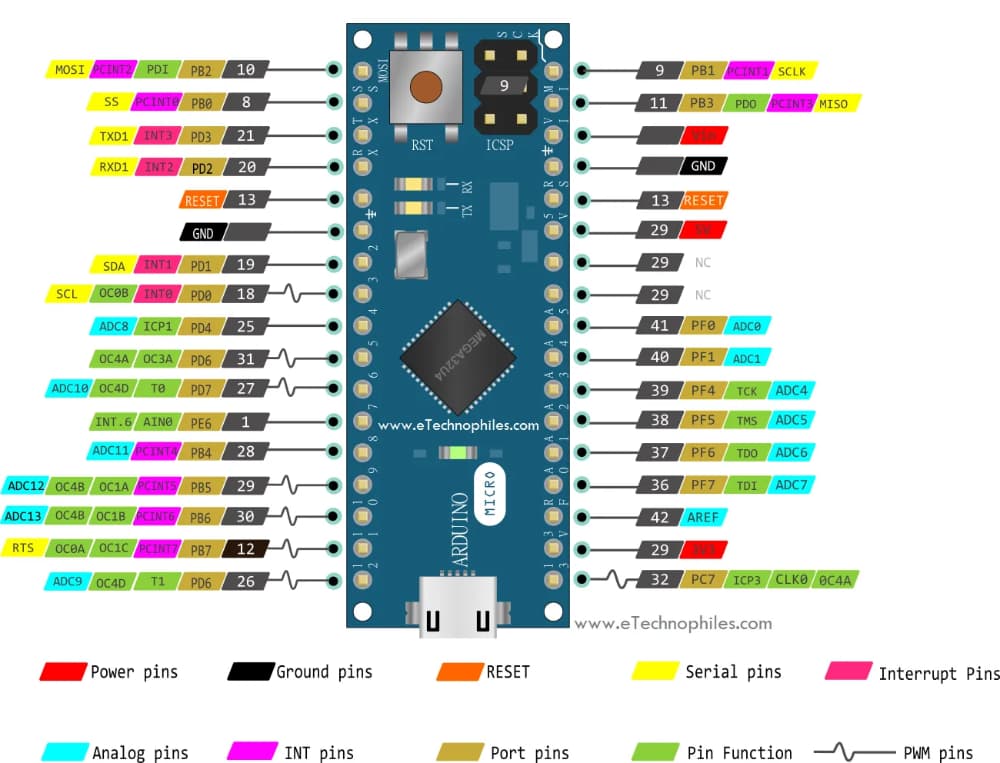
esta es la foto de las conexiones

este el codigo
//htek-h002 F1 Steering Wheel
//Based on the Buttonbox sketch from Amstudio and the Nextionmicrobridge which can be found at "C:\Program Files (x86)\SimHub\_Addons\NextionMicroBridge"
//ThronEisvogel
//15.01.2022
#include <Keypad.h>
#include <Joystick.h>
#include <Adafruit_NeoPixel.h>
#define INCLUDE_WS2812B
#define ENABLE_PULLUPS
#define NUMROTARIES 3 //How many rotary encoders
#define NUMBUTTONS 22 //How many buttons
#define NUMROWS 3 //How many rows
#define NUMCOLS 4 //How many columns
int maxpressedButtons= 1; //Maximum amount of buttons being pressed at the same, use 1 when not using a button matrix with diodes
// How many leds
#define WS2812B_RGBLEDCOUNT 16
// Data pin
#define WS2812B_DATAPIN 11
// 0 left to right, 1 right to left
#define WS2812B_RIGHTTOLEFT 1
//Button arrangement for a 4x4 matrix
byte buttons[NUMROWS][NUMCOLS] = {
{0,1,2},
{3,4,5},
{6,7,8},
{9,10,11},
};
struct rotariesdef {
byte pin1;
byte pin2;
int ccwchar;
int cwchar;
volatile unsigned char state;
};
rotariesdef rotaries[NUMROTARIES] {
{2,3,12,13,0},
{4,5,14,15,0}, //First digit stands for the first pin, second digit stands for the second pin
{6,7,16,17,0},
{8,9,18,19,0},
{10,12,20,21,0},
};
#define DIR_CCW 0x10
#define DIR_CW 0x20
#define R_START 0x0
#ifdef HALF_STEP
#define R_CCW_BEGIN 0x1
#define R_CW_BEGIN 0x2
#define R_START_M 0x3
#define R_CW_BEGIN_M 0x4
#define R_CCW_BEGIN_M 0x5
const unsigned char ttable[6][4] = {
// R_START (00)
{R_START_M, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CCW_BEGIN
{R_START_M | DIR_CCW, R_START, R_CCW_BEGIN, R_START},
// R_CW_BEGIN
{R_START_M | DIR_CW, R_CW_BEGIN, R_START, R_START},
// R_START_M (11)
{R_START_M, R_CCW_BEGIN_M, R_CW_BEGIN_M, R_START},
// R_CW_BEGIN_M
{R_START_M, R_START_M, R_CW_BEGIN_M, R_START | DIR_CW},
// R_CCW_BEGIN_M
{R_START_M, R_CCW_BEGIN_M, R_START_M, R_START | DIR_CCW},
};
#else
#define R_CW_FINAL 0x1
#define R_CW_BEGIN 0x2
#define R_CW_NEXT 0x3
#define R_CCW_BEGIN 0x4
#define R_CCW_FINAL 0x5
#define R_CCW_NEXT 0x6
const unsigned char ttable[7][4] = {
// R_START
{R_START, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CW_FINAL
{R_CW_NEXT, R_START, R_CW_FINAL, R_START | DIR_CW},
// R_CW_BEGIN
{R_CW_NEXT, R_CW_BEGIN, R_START, R_START},
// R_CW_NEXT
{R_CW_NEXT, R_CW_BEGIN, R_CW_FINAL, R_START},
// R_CCW_BEGIN
{R_CCW_NEXT, R_START, R_CCW_BEGIN, R_START},
// R_CCW_FINAL
{R_CCW_NEXT, R_CCW_FINAL, R_START, R_START | DIR_CCW},
// R_CCW_NEXT
{R_CCW_NEXT, R_CCW_FINAL, R_CCW_BEGIN, R_START},
};
#endif
byte rowPins[NUMROWS] = {13,18,19}; //Row-pins on the Arduino Micro/Pro Micro
byte colPins[NUMCOLS] = {20,21,22,23}; //Column-pins on the Arduino Micro/Pro Micro
Keypad steeringwheel = Keypad( makeKeymap(buttons), rowPins, colPins, NUMROWS, NUMCOLS);
Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID,
JOYSTICK_TYPE_JOYSTICK, NUMBUTTONS, 0,
false, false, false, false, false, false,
false, false, false, false, false);
Adafruit_NeoPixel WS2812B_strip = Adafruit_NeoPixel(WS2812B_RGBLEDCOUNT, WS2812B_DATAPIN, NEO_GRB + NEO_KHZ800);
bool LedsDisabled = false;
byte r, g, b;
void ReadLeds() {
while (!Serial.available()) {}
WS2812B_strip.setBrightness(Serial.read());
for (int i = 0; i < WS2812B_RGBLEDCOUNT; i++) {
while (!Serial.available()) {}
r = Serial.read();
while (!Serial.available()) {}
g = Serial.read();
while (!Serial.available()) {}
b = Serial.read();
if (WS2812B_RIGHTTOLEFT > 0)
WS2812B_strip.setPixelColor(WS2812B_RGBLEDCOUNT - 1 - i, r, g, b);
else {
WS2812B_strip.setPixelColor(i, r, g, b);
}
WriteToComputer();
}
WS2812B_strip.show();
for (int i = 0; i < 3; i++) {
while (!Serial.available()) {}
Serial.read();
}
}
static long baud = 9600;
static long newBaud = baud;
void lineCodingEvent(long baud, byte databits, byte parity, byte charFormat)
{
newBaud = baud;
}
int readSize = 0;
int endofOutcomingMessageCount = 0;
int messageend = 0;
String command = "";
void setup() {
Joystick.begin();
rotary_init();
pinMode(LED_BUILTIN, OUTPUT);
Serial.begin(baud);
Serial1.begin(baud);
#ifdef INCLUDE_WS2812B
WS2812B_strip.begin();
WS2812B_strip.setPixelColor(0, 0, 0, 0);
WS2812B_strip.show();
#endif
}
void loop() {
CheckAllEncoders();
CheckAllButtons();
UpdateBaudRate();
while (Serial.available()) {
WriteToComputer();
#ifdef INCLUDE_WS2812B
char c = (char)Serial.read();
if (!LedsDisabled) {
if (messageend < 6) {
if (c == (char)0xFF) {
messageend++;
}
else {
messageend = 0;
}
}
if (messageend >= 3 && c != (char)(0xff)) {
command += c;
while (command.length() < 5) {
WriteToComputer();
while (!Serial.available()) {}
c = (char)Serial.read();
command += c;
}
if (command == "sleds") {
ReadLeds();
}
if (command == "dleds") {
DisableLeds();
}
else {
Serial1.print(command);
}
command = "";
messageend = 0;
}
else {
Serial1.write(c);
}
}
else {
Serial1.write(c);
}
#else
char c = (char)Serial.read();
Serial1.write(c);
#endif
}
WriteToComputer();
}
void WriteToComputer() {
while (Serial1.available()) {
char c = (char)Serial1.read();
Serial.write(c);
}
}
void UpdateBaudRate() {
// Update baudrate if required
newBaud = Serial.baud();
if (newBaud != baud) {
baud = newBaud;
Serial1.end();
Serial1.begin(baud);
}
}
void DisableLeds() {
LedsDisabled = true;
Serial.write("Leds disabled");
}
void CheckAllButtons(void) {
if (steeringwheel.getKeys())
{
for (int i=0; i<maxpressedButtons; i++)
{
if ( steeringwheel.key[i].stateChanged )
{
switch (steeringwheel.key[i].kstate) {
case PRESSED:
case HOLD:
Joystick.setButton(steeringwheel.key[i].kchar, 1);
break;
case RELEASED:
case IDLE:
Joystick.setButton(steeringwheel.key[i].kchar, 0);
break;
}
}
}
}
}
void rotary_init() {
for (int i=0;i<NUMROTARIES;i++) {
pinMode(rotaries[i].pin1, INPUT);
pinMode(rotaries[i].pin2, INPUT);
#ifdef ENABLE_PULLUPS
digitalWrite(rotaries[i].pin1, HIGH);
digitalWrite(rotaries[i].pin2, HIGH);
#endif
}
}
unsigned char rotary_process(int _i) {
unsigned char pinstate = (digitalRead(rotaries[_i].pin2) << 1) | digitalRead(rotaries[_i].pin1);
rotaries[_i].state = ttable[rotaries[_i].state & 0xf][pinstate];
return (rotaries[_i].state & 0x30);
}
void CheckAllEncoders(void) {
for (int i=0;i<NUMROTARIES;i++) {
unsigned char result = rotary_process(i);
if (result == DIR_CCW) {
Joystick.setButton(rotaries[i].ccwchar, 1); delay(50); Joystick.setButton(rotaries[i].ccwchar, 0);
};
if (result == DIR_CW) {
Joystick.setButton(rotaries[i].cwchar, 1); delay(50); Joystick.setButton(rotaries[i].cwchar, 0);
};
}
}