Hi,
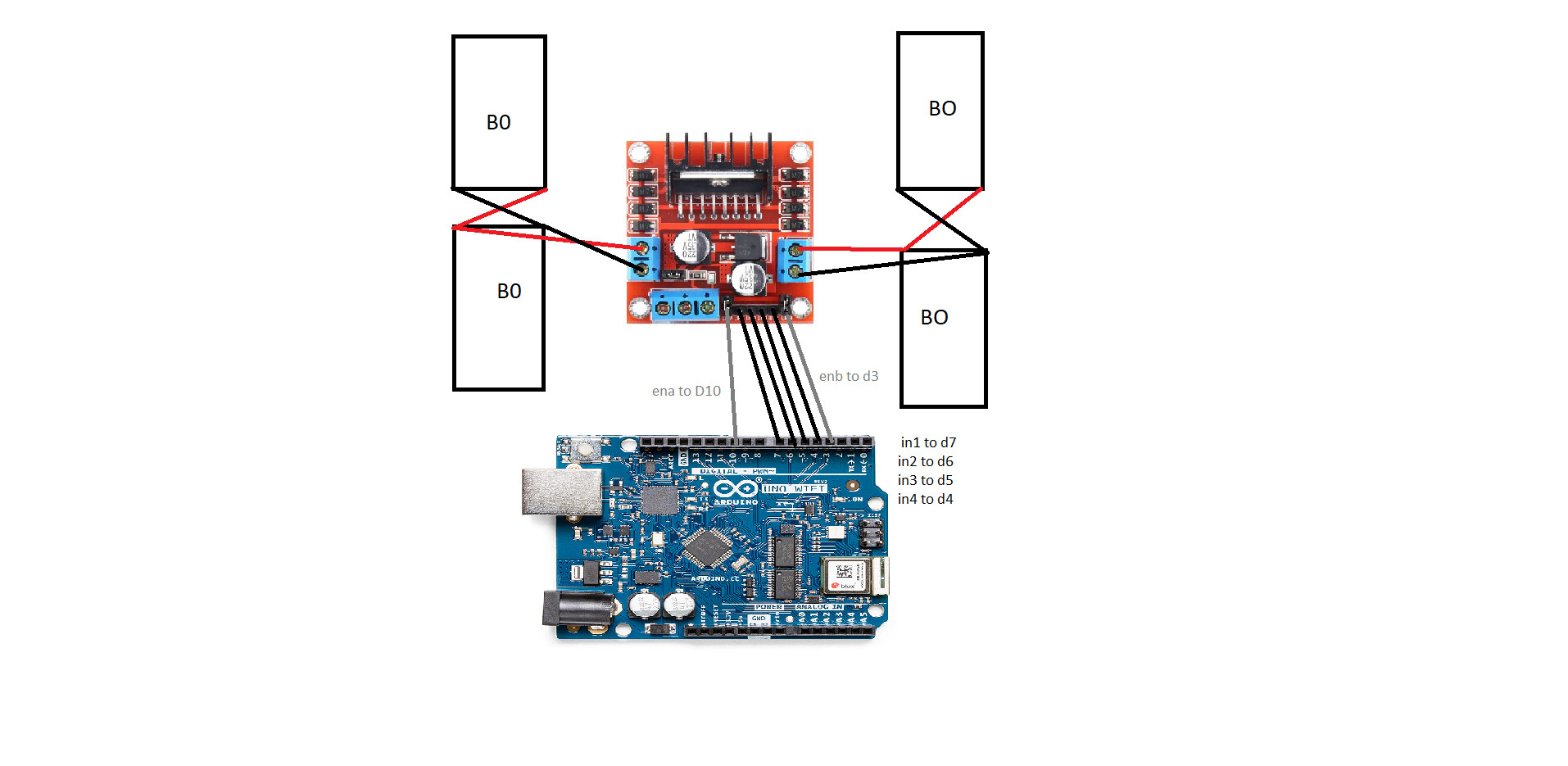
I have problems controlling speed of my DC motors, if I set value to 130 to 250 it works, but if I want to slow it down, it's like It doesn't have power (I don't see logic here, if I have power for full speed, I don't know how I don't have power for less usage), there is picture of my scheme, it's bigger project but I only have problem with this, everything else is working, so I will put only this piece with code
#define speedControlR 10
#define speedControlL 3
#define rightMotorForward 6
#define rightMotorBackward 7
#define leftMotorForward 4
#define leftMotorBackward 5
void setup()
{
pinMode(speedControlR , OUTPUT);
pinMode(speedControlL , OUTPUT);
pinMode(rightMotorForward , OUTPUT);
pinMode(rightMotorBackward , OUTPUT);
pinMode(leftMotorForward , OUTPUT);
pinMode(leftMotorBackward , OUTPUT);
}
void loop()
{
//my code is going here where I call other functions
}
void forward()
{
analogWrite(speedControlR, 80);
analogWrite(speedControlL, 80);
digitalWrite(rightMotorForward, HIGH);
digitalWrite(rightMotorBackward, LOW);
digitalWrite(leftMotorForward, HIGH);
digitalWrite(leftMotorBackward, LOW);
}
void backward()
{
analogWrite(speedControlR, 80);
analogWrite(speedControlL, 80);
digitalWrite(rightMotorForward, LOW);
digitalWrite(rightMotorBackward, HIGH);
digitalWrite(leftMotorForward, LOW);
digitalWrite(leftMotorBackward, HIGH);
}
void right()
{
analogWrite(speedControlR, 80);
analogWrite(speedControlL, 80);
digitalWrite(rightMotorForward, LOW);
digitalWrite(rightMotorBackward, HIGH);
digitalWrite(leftMotorForward, HIGH);
digitalWrite(leftMotorBackward, LOW);
}
void left()
{
analogWrite(speedControlR, 80);
analogWrite(speedControlL, 80);
digitalWrite(rightMotorForward, HIGH);
digitalWrite(rightMotorBackward, LOW);
digitalWrite(leftMotorForward, LOW);
digitalWrite(leftMotorBackward, HIGH);
}
void stop()
{
analogWrite(speedControlR, 80);
analogWrite(speedControlL, 80);
digitalWrite(rightMotorForward, LOW);
digitalWrite(rightMotorBackward, LOW);
digitalWrite(leftMotorForward, LOW);
digitalWrite(leftMotorBackward, LOW);
}
