Hello!
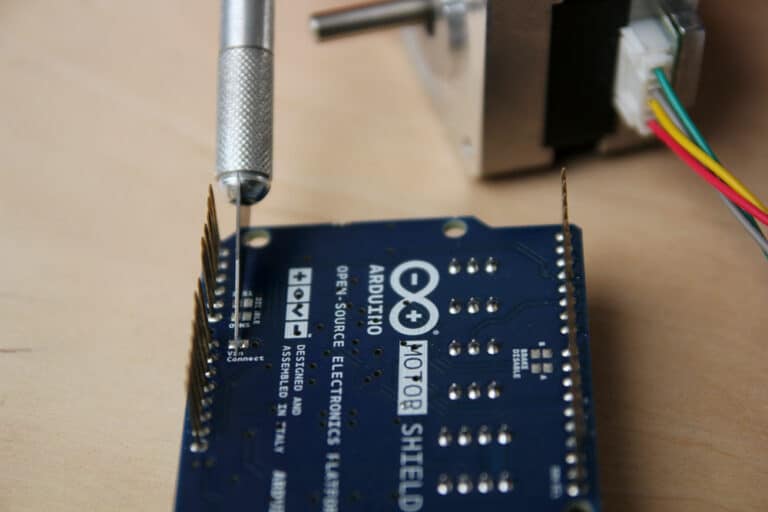
I'm working with an Uno R3 and the Uno Motor Shield, connected to a four-wire stepper motor (Pololu SY35ST28-0504A). Initially, it worked, but I'm afraid I may have turned on the 10V power supply and the Uno in the wrong sequence. I also neglected to break the "Vin" jumper on the back of the motor shield. Now, the 'A-' LED blinks, but nothing else, and, of course, the motor doesn't move. Is there a way to fix the motor shield, or should I just cut my losses and buy a new one?
This is the explanation of the jumper and external power supplies:
"It is possible to directly power the shield from the Arduino, but this is not recommended. When the stepper motor draws too much current, you can damage both the shield and the Arduino. I therefore recommend to use an external power supply for the motors.
To do this you have to cut the Vin Connect jumper on the back of the shield. After doing this you can power the Arduino separately with a USB cable or via the 5.5 mm DC power jack."
As for sketches, I've been using the example sketches in the AccelStepper library. They worked without problems until I inadvertently sequenced the power supplies out of order.
Here's one:
// Quickstop.pde
// -*- mode: C++ -*-
//
// Check stop handling.
// Calls stop() while the stepper is travelling at full speed, causing
// the stepper to stop as quickly as possible, within the constraints of the
// current acceleration.
//
// Copyright (C) 2012 Mike McCauley
// $Id: $
#include <AccelStepper.h>
// Define a stepper and the pins it will use
AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
void setup()
{
stepper.setMaxSpeed(20);
stepper.setAcceleration(100);
}
void loop()
{
stepper.moveTo(500);
while (stepper.currentPosition() != 300) // Full speed up to 300
stepper.run();
stepper.stop(); // Stop as fast as possible: sets new target
stepper.runToPosition();
// Now stopped after quickstop
// Now go backwards
stepper.moveTo(-500);
while (stepper.currentPosition() != 0) // Full speed basck to 0
stepper.run();
stepper.stop(); // Stop as fast as possible: sets new target
stepper.runToPosition();
// Now stopped after quickstop
}
This is my understanding of this jumper on the shield.
As the text says:
When the stepper motor draws too much current, you can damage both the shield and the Arduino. I therefore recommend to use an external power supply for the motors.
That is correct.
But if you do not cut this jumper, what can happen:
The voltage that feeds the Arduino via the power sipply, (P2 connector) and the voltage that feeds the shield, (from Vin), are the same. No problem.
The voltage that feeds the Arduino via the power sipply, (P2 connector) is higher than the voltage that feeds the shield, (from Vin). It "could" even damage the power supply that feeds the shield, but not the shield.
The voltage that feeds the Arduino via the power sipply, (P2 connector) is
lower than the voltage that feeds the shield, (from Vin). No problem because there is a diode between the power input and Vin of the UNO.
Conclusion: Use a diode between the source that powers the shield and the shield, thus avoiding case no. 2.