heureux possesseurs d'un douzaine de gallinacés, je souhaite faire un distributeur automatique piloté par un UNO. je dispose d'une motorisation 12 VCC de 130 W (moteur essuie glace). l'idée est de piloter ce moteur en gros toute les deux heures. je doit faire ouvrir une vanne 1/4 de tour et la refermer après "xxx" secondes.
donc je doit connaitre la position de ma vanne. capteur de proximité industriel??
commander deux sens de rotation ouvert/ fermé
et surtout réduire la vitesse car après des essais mécaniques la première vanne s'est disloquée dût au couple élevé du réducteur et la vitesse trop élevée également, presque j'aurai pu faire de la mayo...
je pense utilisé un pont en H ( I6203?) qui supporte 10A en nominal ( a la pince ampèremétrique je suis autour de 5A)
Pour le câblage pas de soucis c'est mon travail je suis electrotec en BE, par contre le code ouille c'est pas terrible.
voila pour débuter mon projet, dans l'attente de vous lire
donc je doit connaitre la position de ma vanne. capteur de proximité industriel??
bonsoir
AMHA tu n'a besoin que de savoir si ta vanne est en position ouvert ou fermée, connaitre sa position exacte est il me semble relativement inutile.
2 contacts "fin de course" devraient faire la "rue michel"
Pour le pont en H , c'est l'appli typique d'un pont en H hybride
achess:
Bonjour,
Ce serait plus simple avec un servo moteur. Pas besoin de pont H et position déterminée par la programmation.
hello tout le monde,
Existe t'il des servos moteurs avec un tel couple? de plus ce moteur je le possède déjà alors j'aimerai l'utiliser
mais c'est sur que pour la position c'est l'ideal. pouvez vous me confirmer que l'ont peut faire varier la vitesse du moteur en agissant sur la commande du pont via un PWM?
BrUnO14200:
Tu as déja du voir mais tapes sur google "cat feeder arduino" , ça peut donner des idées ... !
trop bien leur montage, ça me donne des pistes a suivre certainement plus simple que l'usine a gaz que j'allais essayer de faire, du coup un plus petit moto-réducteur peut faire le job je pense. merci pour l'info.
marc13bdr:
trop bien leur montage, ça me donne des pistes a suivre certainement plus simple que l'usine a gaz que j'allais essayer de faire, du coup un plus petit moto-réducteur peut faire le job je pense. merci pour l'info.
bonjour
c'est aussi typiquement l'application d'un pont en H hybride
c'est rustique , mais efficace
sinon pourquoi ne pas "exploiter" le systeme de fin de course qui est present a l interieur des moteurs d essuie glace ( une impulsion , et le moteur fait un tour )
bon WE a tous
homer
ne serait il pas préférables que tu parte sur un moteur avec une vis sans fin?
Avec la trappe tu auras des débit différent suivant le niveau de grain dans ton réservoir (plein elles se gavent, puis vers la fin c'est la diète )
et avec la vis sans fin : un moteur et un temps de marche de x temps toutes les x temps. (code simplifié et pas d'autres composant)
ArNo:
ne serait il pas préférables que tu parte sur un moteur avec une vis sans fin?
Avec la trappe tu auras des débit différent suivant le niveau de grain dans ton réservoir (plein elles se gavent, puis vers la fin c'est la diète )
et avec la vis sans fin : un moteur et un temps de marche de x temps toutes les x temps. (code simplifié et pas d'autres composant)
bonjour, j'y ai également pensé à la vis sans fin, le tout étant de la trouver, parce que la faire sois même c'est tout sauf facile a réaliser. l'idée du cat feeder me semble pas mal du tout reste a trouver "la matière." pour faire cette écluse rotative.. je continu de chercher mais j'avance bien grace a vous. merci
Dès que j'attaque le code je pense vous demander conseil. merci encore.
Ya aussi les systèmes de trappe bricolées avec des rails de tiroirs et actionnées par servomoteur .
Pour le servomoteur tu peux récupérer le système d'ouverture centralisée de "ta" Clio donneuse d'organes
Bonsoir MARC13BDR , j'ai fais un système pour nourrir 3 chats voraces et je l'ai décliner aussi pour nourrir 2 chèvre naines .
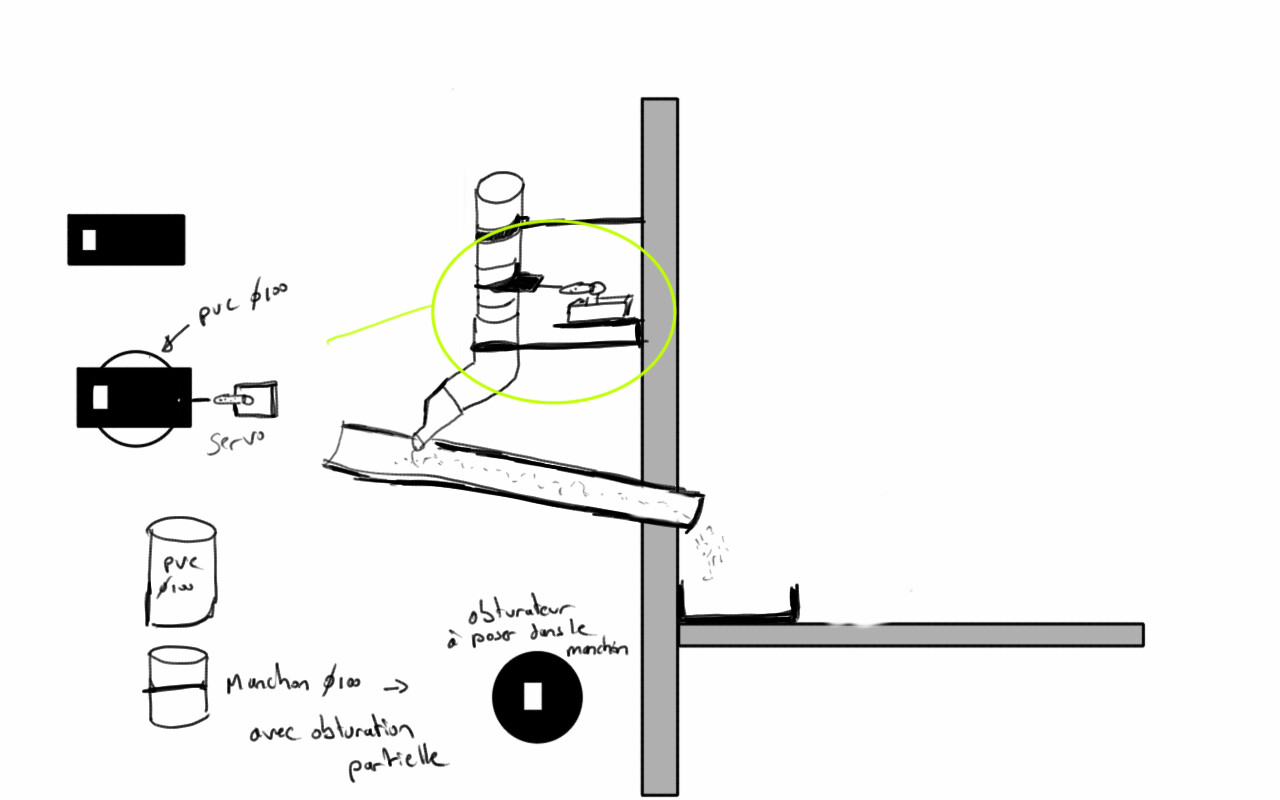
Il fonctionne parfaitement , pour les chèvre naines j'ai utiliser du PVC diamètre 100 sous forme d'une colonne avec une guillotine horizontale piloter par servo .
schéma à venir .
En attendant voila ce que j'ai fait pour les chats :
Dans le manchon diamètre 100 j'ai fabriquer un obturateur avec un PVC découper et mis à plat au décapeur thermique et dessus une lame pvc qui glisse , quand les deux fenêtres coïncident les croquettes tombes .
L'avantage du PVC c'est que ce n'est pas très cher et on peux couder et mettre un bouchon en partie haute pour fermer la réserve de croquettes , mon distributeur est accrocher au mur et la gouttière achemine les rations de nourriture à l’extérieure tous les soir à 17h00 avec 2 séquences aller retour du servo .
J'ai étudier le système vis sans fin , sans imprimante 3d difficile de ne pas avoir des frottements et des blocages.