Hi, there
I think the doc for 6-axis IMU of Nano RP2040 Connect is wrong.
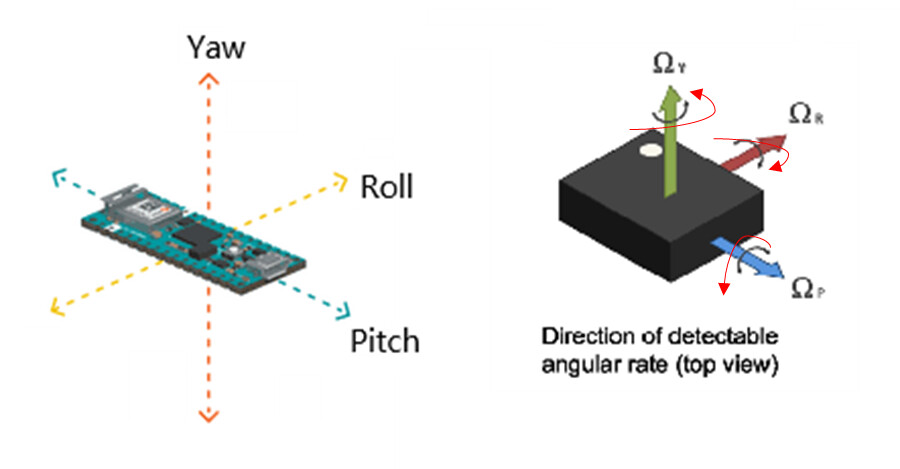
The source website https://docs.arduino.cc/tutorials/nano-rp2040-connect/rp2040-imu-basics/
But I think it should be like this:

Do you agree with me?
Hi, there
I think the doc for 6-axis IMU of Nano RP2040 Connect is wrong.
The source website https://docs.arduino.cc/tutorials/nano-rp2040-connect/rp2040-imu-basics/
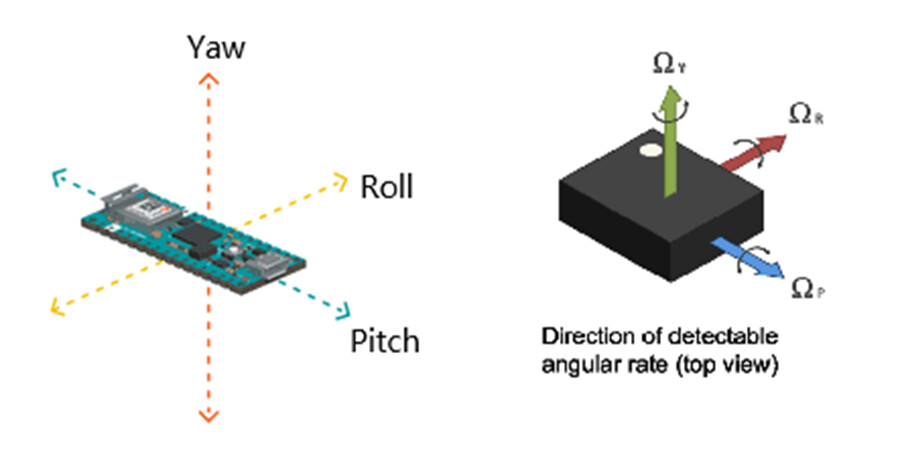
But I think it should be like this:
Do you agree with me?
yes, after consulting to datasheet I agree that the x and y axes are swapped.
Moreover, I remember that it was already written about on the forum, but I can't find the link now.
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.