I know it is not a good idea to dremel away parts of PCBs in general.
Reason I try/do this is for creating really tiny robots:
Tiny MicroPython robots (the PCB IS the robot platform)
I have completed 3 tiny robots sofar, and two others are in the works.
Just to give an idea, this is my Tiny2040bot:

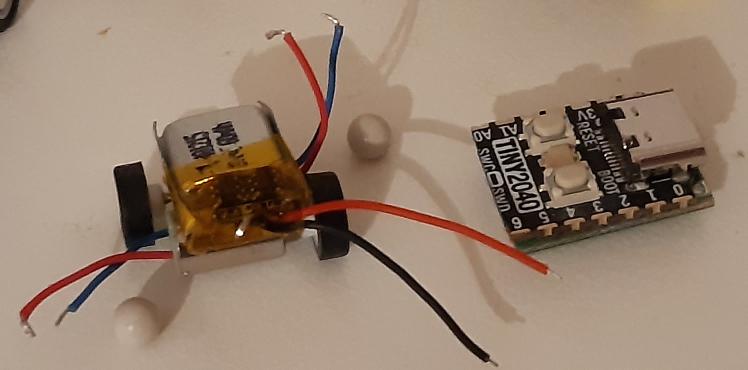
Top left in below photo you see three Tiny2040 modules, based on Raspberry RP2040 MCU.
I used Dremel successfully to reduce from 22.9×18.2mm to 19.5×14.9mm, still functioning:
https://forums.raspberrypi.com/viewtopic.php?t=324698
Below are crazy small ESP8285 modules (compatible to ESP8266), I learned yesterday how to flash them and turned the right ESP-M2 module into wireless AP, with MicroPython REPL access through browser WebREPL (only GND+VCC connected finally).
The left is only 10x11x2mm, but needs external antenna, which I plan to bend for smallest robot:
https://forums.raspberrypi.com/viewtopic.php?t=324698#p1945049
I used ESP-01 with WifiToSerial.ino example for wirless MicroPython REPL of Tiny2040 and Raspberry Pico, and as standalone MicroPython MCU with wireless REPL in my Toycarbot.
I tested the 25mAh 401015 lipo being capable of driving solar toy car I use the motor from as basis for my robots, 4.5×10.5×15.9mm !
Right are two motors and wheels I extracted from solar toy car. The toy car uses gear train, here I superglued the 8mm diameter wheels onto motor shafts of 6mm diameter 10mm long micro motors, with total length of 16mm.
Right top are two 0.8"x0.5" Pololu DRV8835 motor controllers, and a 0.7"x0.4" Pololu DRV8835. I did remove the bottom two rows with Dremel because I wanted not to use the AISEN/BISEN/S̅L̅P̅/ F̅L̅T̅ pins. I had tested the module working before, but after the modification none of the 4 output pins showed anything. At least I was able to reduce the left DRV8835 with Dremel to 19.1x12.7mm still working:

Are there any other motor controller modules for driving micro motors with smaller than 17.7x10.2mm PCB size?