Hi
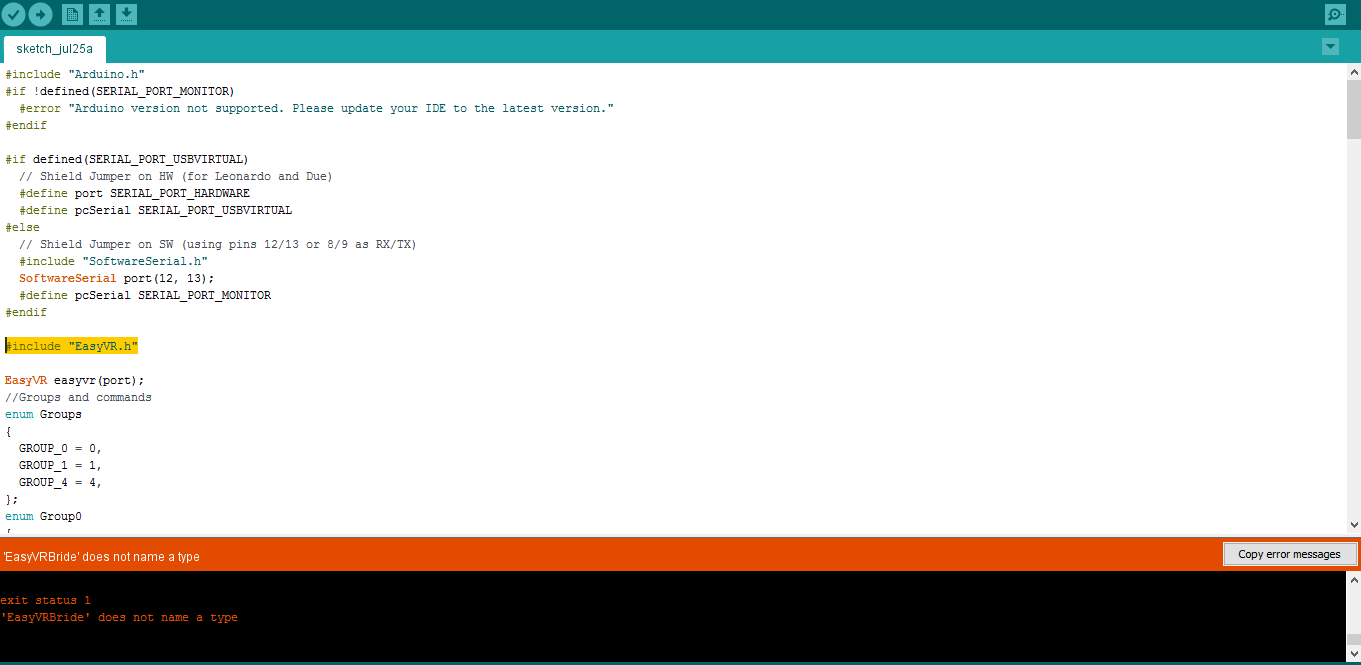
what this library's mistakes, and other code that is out of this error. On how to fix this error.
#include "Arduino.h"
#include "SoftwareSerial.h"
SoftwareSerial port(12,13);
#include "EasyVR.h"
EasyVR easyvr(port);
//Groups and Commands
enum Groups
{
GROUP_0 = 0,
GROUP_1 = 1,
GROUP_3 = 3,
};
enum Group0
{
G0_ROBOT= 0,
};
enum Group1
{
G1_MOVE = 0,
G1_TIME = 1,
G1_DATE = 2,
G1_LOCATION = 3,
G1_TEMPERATURE = 4,
G1_COLOUR = 5,
G1_HUMIDITY = 6,
G1_MOTION = 7,
G1_DISTANCE = 8,
G1_BEARING = 9,
G1_POWER = 10,
G1_AIR = 11,
G1_DISPLAY = 12,
G1_QUESTION = 13,
G1_MANUAL = 14,
G1_AUTO = 15,
G1_RUN = 16,
G1_POWERDOWN = 17,
G1_WAKEUP = 18,
};
enum Group3
{
G3_LEFT = 0,
G3_RIGHT = 1,
G3_FORWARD = 2,
G3_BACKWARD = 3,
G3_FOLLOW = 4,
G3_STOP = 5,
G3_GRAB = 6,
};
EasyVRBridge bridge;
int8_t group, idx;
void setup()
{
// bridge mode?
if (bridge.check())
{
cli();
bridge.loop(0, 1, 12, 13);
}
// run normally
Serial.begin(9600);
port.begin(9600);
Serial.println("setup good");
if (!easyvr.detect())
{
Serial.println("EasyVR not detected!");
for (;;);
}
easyvr.setPinOutput(EasyVR::IO1, LOW);
Serial.println("EasyVR detected!");
easyvr.setTimeout(5);
easyvr.setLanguage(0);
group = EasyVR::TRIGGER; //<-- start group (customize)
}
void action();
void loop()
{
easyvr.setPinOutput(EasyVR::IO1, HIGH); // LED on (listening)
Serial.print("Say a command in Group ");
Serial.println(group);
easyvr.recognizeCommand(group);
do
{
// can do some processing while waiting for a spoken command
}
while (!easyvr.hasFinished());
easyvr.setPinOutput(EasyVR::IO1, LOW); // LED off
idx = easyvr.getWord();
if (idx >= 0)
{
// built-in trigger (ROBOT)
// group = GROUP_X; <-- jump to another group X
return;
}
idx = easyvr.getCommand();
if (idx >= 0)
{
// print debug message
uint8_t train = 0;
char name[32];
Serial.print("Command: ");
Serial.print(idx);
if (easyvr.dumpCommand(group, idx, name, train))
{
Serial.print(" = ");
Serial.println(name);
}
else
Serial.println();
easyvr.playSound(0, EasyVR::VOL_FULL);
// perform some action
action();
}
else // errors or timeout
{
if (easyvr.isTimeout())
Serial.println("Timed out, try again...");
int16_t err = easyvr.getError();
if (err >= 0)
{
Serial.print("Error ");
Serial.println(err, HEX);
}
}
}
void action()
{
switch (group)
{
case GROUP_0:
switch (idx)
{
case G0_ROBOT:
// write your action code here
digitalWrite(8,HIGH); // LED to tell me if this is working
Serial.println("IT WORKS");
group = GROUP_1;
delay(10);
digitalWrite(8,LOW);
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
}
break;
case GROUP_1:
switch (idx)
{
case G1_MOVE:
// write your action code here
digitalWrite(7, HIGH); // LED to tell me if this is working
delay(1000);
digitalWrite(7, LOW);
Serial.println("YES");
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_TIME:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_DATE:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_LOCATION:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_TEMPERATURE:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_COLOUR:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_HUMIDITY:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_MOTION:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_DISTANCE:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_BEARING:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_POWER:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_AIR:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_DISPLAY:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_QUESTION:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_MANUAL:
// write your action code here
digitalWrite(6, HIGH); // LED's to tell me this is working
delay(1000);
digitalWrite(6, LOW);
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_AUTO:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_RUN:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_POWERDOWN:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G1_WAKEUP:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
}
break;
case GROUP_3:
switch (idx)
{
case G3_LEFT:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_RIGHT:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_FORWARD:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_BACKWARD:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_FOLLOW:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_STOP:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
case G3_GRAB:
// write your action code here
// group = GROUP_X; <-- or jump to another group X for composite commands
break;
}
break;
break;
}
}
sketch_jul27b.ino (7.22 KB)