Hi - I'm using a single SS49E hall sensor to detect magnetic polarities. I have a lot of electrical equipment around, so there's a fair amount of field 'fuzz' in the air, making it difficult to get a definite measurement.
To address this, I made a calibration feature for the microcontroller to run that creates a threshold based on min and max values over the course of a 30 second interval. That way all of the field fluctuation is accounted for and a positive result is only signaled when the hall sensor goes above or below the min/max ambient field values.
OK...now the actual problem: in order to trigger the field, a single alnico-2 pole end has to be placed right up against the sensor (this is for guitar pickups) to get a reading while avoiding false results from the ambient fields.
It's not ideal because I'd like to have the hall sensor in a little housing, so I really would prefer to have a few millimeters of effective distance for measuring.
Right now I'm running on 3.3v, but I found 5v didn't make too much difference apart from the ambient field min/max shifting higher.
Is there any way to increase the effective field of measurement for the SS49E hall sensor?
Is there any way to increase the effective field of measurement for the SS49E hall sensor?
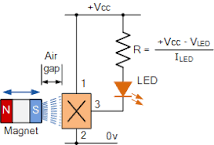
Excellent question. Unfortunately the field of measurement is a function of the sensor sensitivity which is
intrinsic to the design so , while it is easy to amplify the sensor output , it is not possible to make the sensor 'more sensible' (sensitive). SS49E HALL SENSOR.
in order to trigger the field, a single alnico-2 pole end has to be placed right up against the sensor
Unfortunately, this is for an automated guitar pickup winding machine, and with guitar pickups you tend to get some very old alnico poles when re-winding old sets. Just wanted to be as inclusive as possible - I think I'm going to stick the end of the sensor behind a very tight 1mm PLA wall for the prototype....will see how that goes.
Slumpert:
Confused,
Why do you need a Hall sensor to trigger off the pickup magnets themselves when winding in that apparatus?
You seem to have a large platen you could monitor or just keep track of the number of steps you send to the stepper motor.
The hall sensor is just to help users orient their magnet poles before winding, it doesn't tie into the motor functions at all. It's an auxiliary feature - in the future, I'd like to put a resistance tester so it'd be an all-in-one winding station.
That little circle at the top of the left side of the chassis above the screen dash is where the hall sensor will be embedded.
I'm sorry but I can't tell where you are referring to.
Is it possible to draw a yellow circle around it using Paint ?
Since hall sensor sensitivity is intrinsic to it's design, is it possible for you to simply choose a more sensitive hall sensor ?
The hall sensor is just to help users orient their magnet poles before winding, it doesn't tie into the motor functions at all. It's an auxiliary feature - in the future, I'd like to put a resistance tester so it'd be an all-in-one winding station.
For the sake of discussion, I think the appearance of the machine is irrelevant to this post.
What would be useful would be a blowup illustration of the pole magnet placed above the hall sensor with the rest of the machine left out since we don't care about the rest of it.
If you can include dimensions that would be great. (the "Air-Gap" seems to be the critical dimension)
I think I'm going to stick the end of the sensor behind a very tight 1mm PLA wall for the prototype.
It seems you have 3D CAD S/W so why didn't you just include a blowup of the sensor and the pole magnet since that seems to be all that matters in this case ?
Like this:
A steel shielding shell behind the hall sensor might provide enough reduction in background noise to help.
I don't see how that is relevant being that the only sensitive area of the sensor is 1 mm (or so ) in front of the FACE of the sensor.
It's very directional.
The sensor is not sensing anything behind or around it so I don't know why you think shielding would help.
Slumpert:
A steel shielding shell behind the hall sensor might provide enough reduction in background noise to help.
That might be it! I can't believe I didn't think of it...instead of increasing the field strength, just reduce the noise for what's there.
With a guitar pickup / electronics cavity on a guitar, you'll line the surrounding walls with copper foil to reduce static hum. Would this be suitable for magnetic interference or does it have to be steel?
raschemmel:
I don't see how that is relevant being that the only sensitive area of the sensor is 1 mm (or so ) in front of the FACE of the sensor.
It's very directional.
The sensor is not sensing anything behind or around it so I don't know why you think shielding would help.
It actually does pick up signals from all directions, but is the most effective measuring stuff directly above it. Shielding might actually be the answer - especially since in the design you can see the stepper motors, power supply, and other components are all around below it.
raschemmel:
So your are saying that if there is no magnet in front of it you still get readings ?
If so, what level ? (%maximum)
There has to be a limit to the sensing envelope and I suspect it is about 1 inch.
There's always readings, it's sensitive to any magnetic fields and there's quite a few from the motors and power supply I'm sure. Especially on a desk next to my computer etc. That's what the calibration feature is for though, it chops out the noise and only indicates from a certain threshold.
Since the threshold is higher, the magnet has to be right up against it in most cases to signal a polarity.