Hi All,
I just went down to a local shop and wanted to buy a MG995 TowerPro Servo Motor 360 as I need a bigger rotation as compared to the MG995 180 Degrees. However, I was told that the 360 degree motion is not able to fix a angle position as compared to the 180 degree one.
Would like to clarify this issue with other users whom have used these two versions before.
Regards,
vader92
Hi,
It's true a 360 rotation servo, will only rotate CC or ACC it will not stop at any other setting but 90.
A value of 90 is the stop setting anything below 90 is (I think) reverse and above 90 forward, with speed increasing to the end values 0-180.
These are intended to be used as normal DC motors, the point being you need no driver board/module, and only one signal line to control them. I have a robot that uses them...
Hope it helps.
Mel.
Yes. When people say a servo is 360 degrees what they usually mean is that it is continuous rotation. Effectively it is a motor now not a servo at all.
You can get some positional servos with high angular control but it's usually either only up to about 270 degrees or they are specialised ones that will do 3 or more complete rotations under full positional control. The latter are normally called winch servos e.g. https://hobbyking.com/en_us/turnigytm-tgy-6114md-digital-sail-winch-servo-drum-type.html
Steve
Hi,
How about using a normal servo and fixing a gear wheel instead of the usual arm! if say that has X number of teeth, then a matching gear with x/2 teeth will double the 180 Deg you get from the servo. The actual number of teeth don't matter just the ratio! I think. Something like one half turn of the big gear should give one full turn of the small gear.
Hope I've got it right, hope it helps.
Mel.
It's stupid to call them 360 degree servos. Usually they are called 360 degree continuous servos. In my opinion they should simply be called continuous servos. Servos, because they look like ones and take orders from servo commands, in an odd way, though.
Hi All,
Thanks for your clarification. It is really helpful !!!
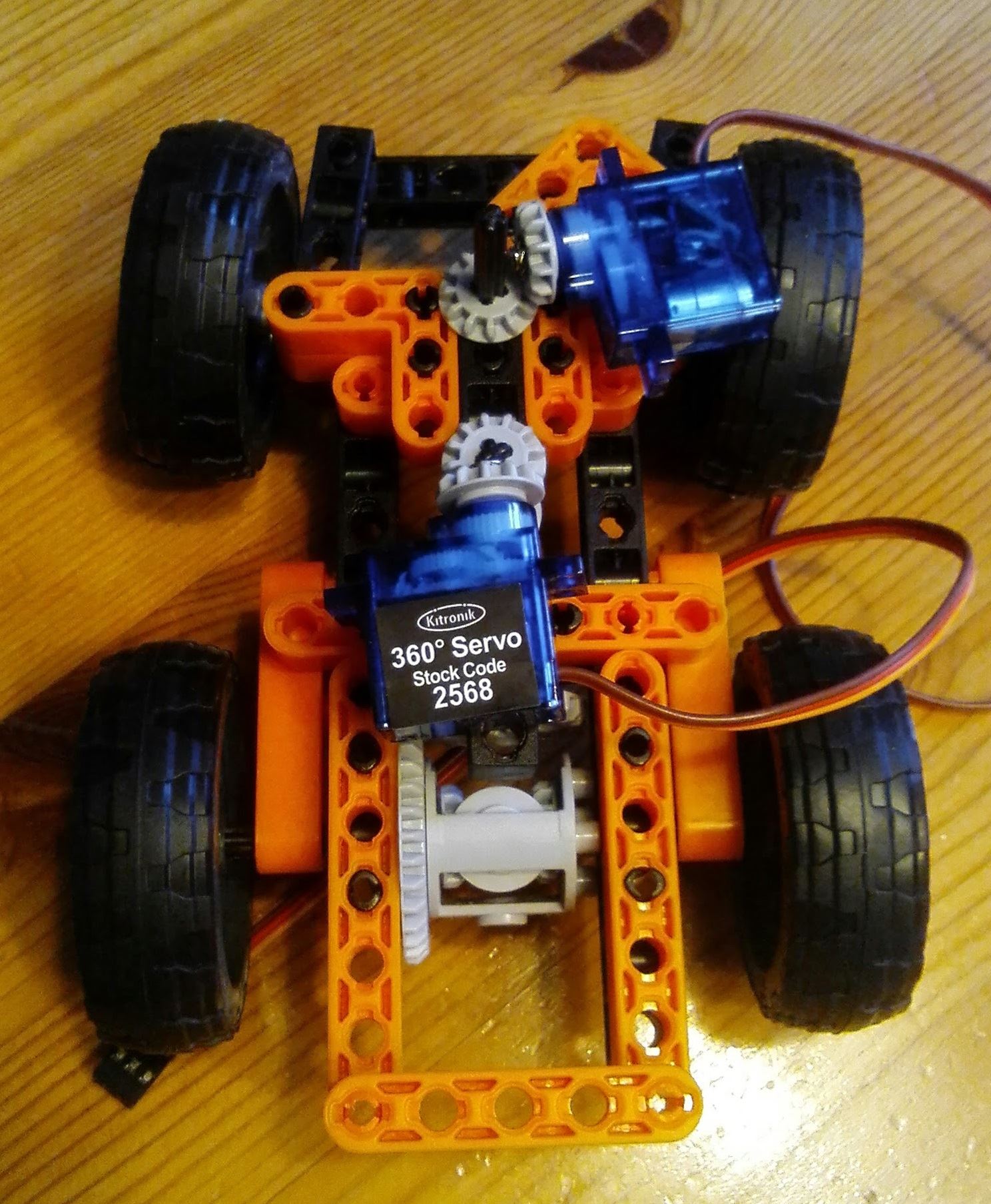
Why continuous servos are handy
Here's a Lego car I built (actually it's a Lego clone). Notice the two grey cog wheels at the top. One is for steering front wheels, one is for driving rear wheels. The Lego model has a differential gear, so this is a very car like model, compared to those robot cars with separate motors for left and right driving wheels.
Each cog wheel gets its own servo. The steering cog wheel has a regular 180º servo, the driving cog wheel has a continuous servo (with the stupid label 360º servo).
So the handy thing is that this only needs the power supply and the data signals. No extra motor driver in between.