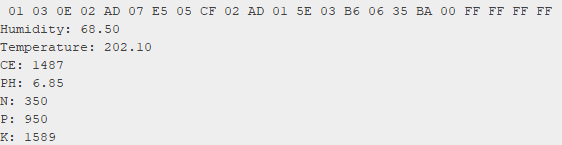
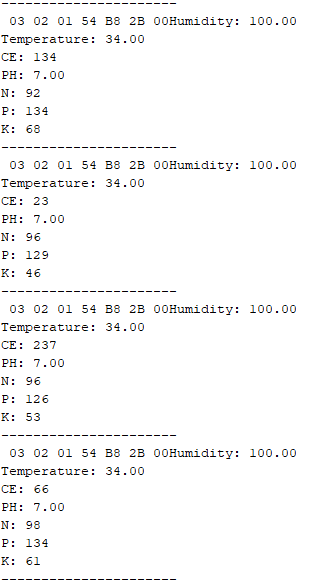
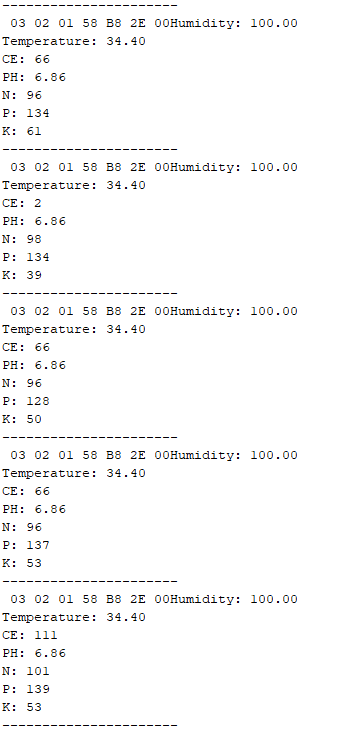
I think it works. I change some parts ,and the serial show me this:

I think the Humidity, Temperature ,and PH. are correct. But i don´t know why the others don´t show nothing. Here's the the updated code.
#include <SoftwareSerial.h>
#include <Wire.h>
#define RE 19 //22
#define DE 18 //23
#define DI 4 //17 TX2 //1 TX0
#define RO 15 //16 RX2 //3 RX0
#define led_on 23
#define led_capture 27
#define led_Soilsensor 25
const byte H[8] = {0x01,0x03,0x00,0x12,0x00,0x01,0x25,0xCA}; //Soil Humidity
const byte T[8] = {0x01,0x03,0x00,0x13,0x00,0x01,0x75,0xCF}; //Soil Temperature
const byte CE[8] = {0x01,0x03,0x00,0x15,0x00,0x01,0x95,0xCE}; //Soil Conductivity
const byte PH[8] = {0x01,0x03,0x00,0x06,0x00,0x01,0x64,0x0B}; //Soil PH
const byte N[8] = {0x01,0x03,0x00,0x1E,0x00,0x01,0xB5,0xCC}; //Soil Nitrogen
const byte P[8] = {0x01,0x03,0x00,0x1F,0x00,0x01,0xE4,0x0C}; //Soil Phosphorus
const byte K[8] = {0x01,0x03,0x00,0x20,0x00,0x01,0x85,0xC0}; //Soil Phosphorus
byte values[11];
float temperature_val = 0.00;
float humidity_val = 0.00;
float PH_val = 0.00;
int CE_val, N_val, P_val, K_val;
SoftwareSerial mod(RO,DI);
void setup() {
Serial.begin(9600);
mod.begin(9600);
pinMode(DE, OUTPUT);
pinMode(RE, OUTPUT);
pinMode(led_on, OUTPUT);
pinMode(led_capture, OUTPUT);
pinMode(led_Soilsensor, OUTPUT);
digitalWrite(led_on, HIGH);
}
void loop() {
humidity_val = Collect_Data_H();
humidity_val = humidity_val * 0.1;
temperature_val = Collect_Data_T();
CE_val = Collect_Data_CE();
CE_val = CE_val * 0.1;
N_val = Collect_Data_N();
P_val = Collect_Data_P();
K_val = Collect_Data_K();
PH_val = Collect_Data_PH();
digitalWrite(led_capture, HIGH);
delay(100);
digitalWrite(led_capture, LOW);
delay(100);
Serial.print("Humidity: "); Serial.println(humidity_val);
Serial.print("Temperature: "); Serial.println(temperature_val);
Serial.print("CE: "); Serial.println(CE_val);
Serial.print("PH: "); Serial.println(PH_val);
Serial.print("N: "); Serial.println(N_val);
Serial.print("P: "); Serial.println(P_val);
Serial.print("K: "); Serial.println(K_val);
Serial.println("----------------------");
delay(500);
}
float Collect_Data_H(){
float humidity;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(H);i++)mod.write(H[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
return values[4];
}
float Collect_Data_T(){
float temperature;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(T);i++)mod.write(T[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
temperature = (values[3]<<8 | values[4])* 0.1;
return temperature;
}
byte Collect_Data_CE(){
float ce;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(CE);i++)mod.write(CE[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
return values[4];
}
float Collect_Data_PH(){
float ph;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(PH);i++)mod.write(PH[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
ph = (values[3]<<8 | values[4])*0.01;
return ph;
}
byte Collect_Data_N(){
float nitrogen;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(N);i++)mod.write(N[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
return values[4];
}
byte Collect_Data_P(){
float phosphorus;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(P);i++)mod.write(P[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
return values[4];
}
byte Collect_Data_K(){
float potassium;
uint32_t startTime;
uint8_t i;
while(mod.available())mod.read();
digitalWrite(DE, HIGH);
digitalWrite(RE, HIGH);
delay(10);
for(i=0;i<sizeof(K);i++)mod.write(K[i]);
digitalWrite(DE, LOW);
digitalWrite(RE, LOW);
i = 0;
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}
}
return values[4];
}
And question. It is necessary leave them 2 second for each value? what is the minimum time that i can give it?
startTime = millis();
while(millis() - startTime <= 2000UL){
if(mod.available() && i<sizeof(values)){
values[i++] = mod.read();
}