Bonjour !
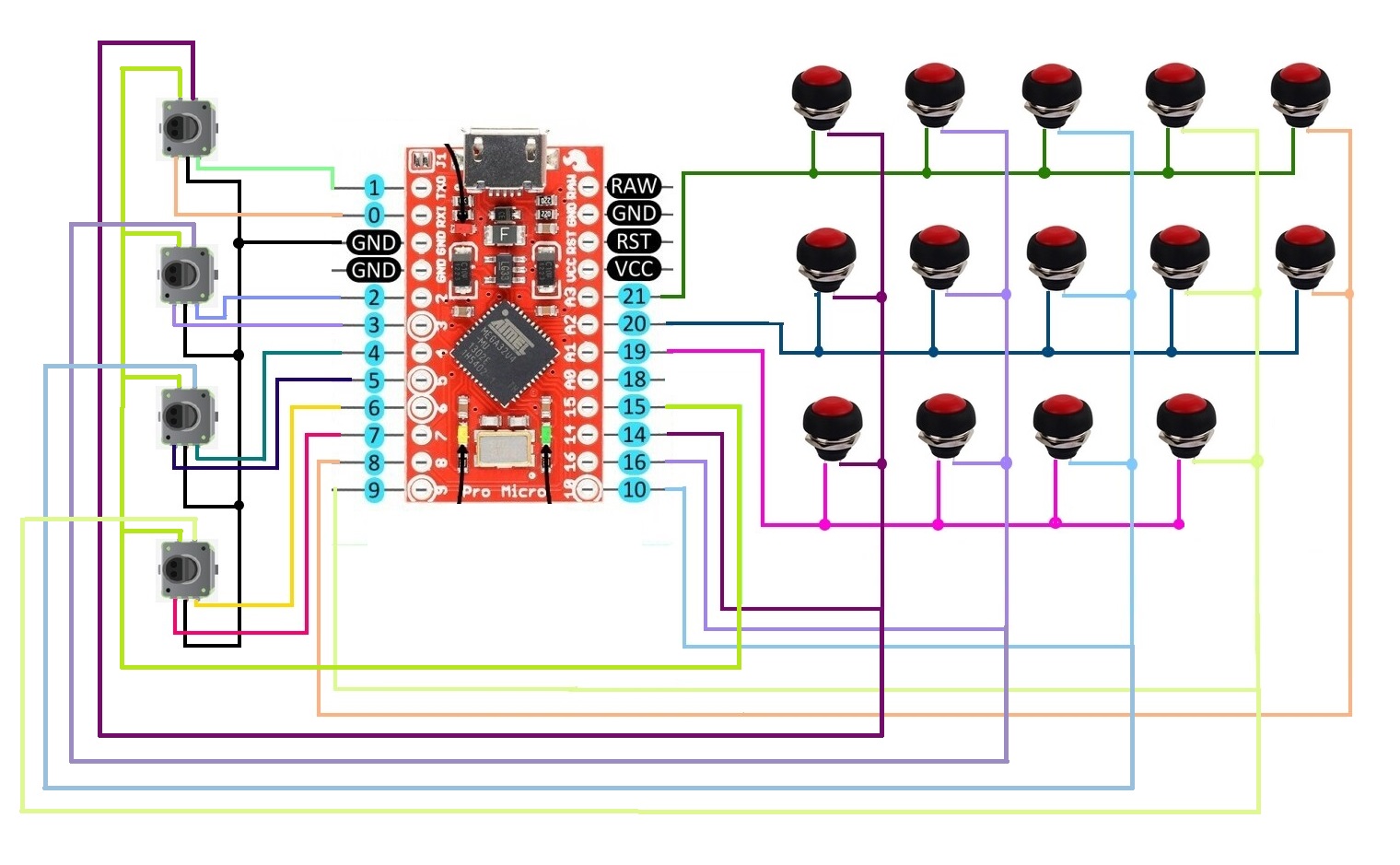
Voilà mon problème : j'ai des interférences sur une boite à bouton simracing branchée sur une Arduino micro Pro, tout fonctionne correctement mais quand j'allume mon volant situé à proximité, j'ai des "micro appuis" aléatoires sur les boutons poussoirs rétroéclairés par LED.
J'ai vérifié ça avec un logiciel de paramétrage d'assignation de bouton et effectivement quand je coupe le volant c'est bon...
Ce problème ne concerne que les bouton poussoirs qui possèdent une Led d'éclairage, les encodeurs rotatifs fonctionnent très bien !
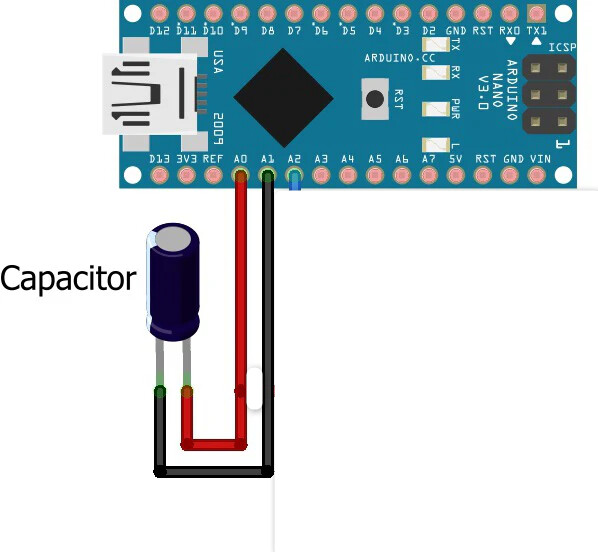
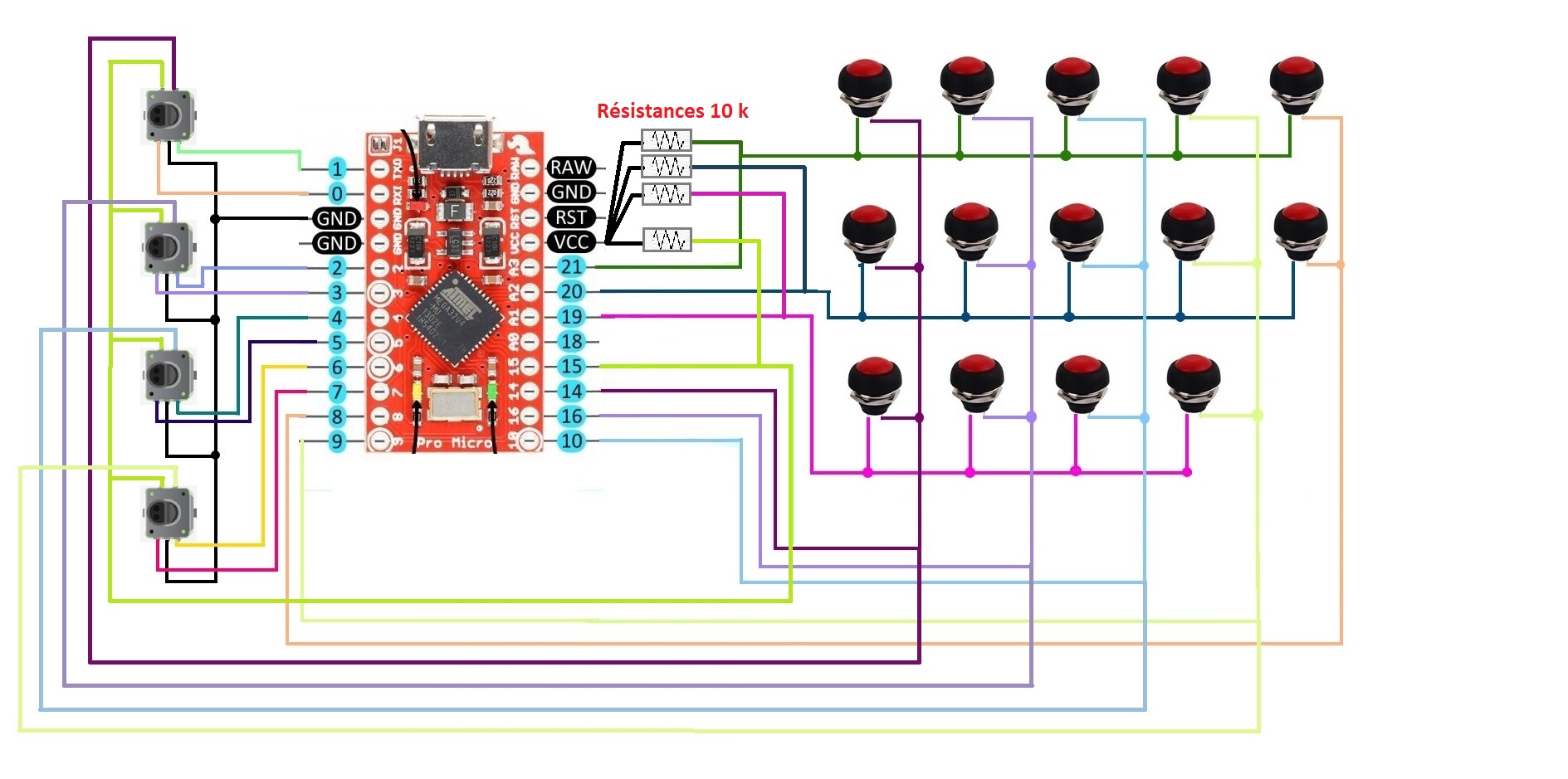
Deux solutions s'ouvrent à moi : isoler la partie alimentation 5volts des LED ou éventuellement insérer dans mon code une durée minimum d'appui sur les boutons avant prise en compte de l'action ?
Comment faire cette modification de code ?
Merci à vous !
//BUTTON BOX
//USE w ProMicro
//Tested in WIN10 + Assetto Corsa
//AMSTUDIO
//20.8.17
#include <Keypad.h>
#include <Joystick.h>
#define ENABLE_PULLUPS
#define NUMROTARIES 4
#define NUMBUTTONS 24
#define NUMROWS 5
#define NUMCOLS 5
byte buttons[NUMROWS][NUMCOLS] = {
{0,1,2,3,4},
{5,6,7,8,9},
{10,11,12,13,14},
{15,16,17,18,19},
{20,21,22,23},
};
struct rotariesdef {
byte pin1;
byte pin2;
int ccwchar;
int cwchar;
volatile unsigned char state;
};
rotariesdef rotaries[NUMROTARIES] {
{0,1,24,25,0},
{2,3,26,27,0},
{4,5,28,29,0},
{6,7,30,31,0},
};
#define DIR_CCW 0x10
#define DIR_CW 0x20
#define R_START 0x0
#ifdef HALF_STEP
#define R_CCW_BEGIN 0x1
#define R_CW_BEGIN 0x2
#define R_START_M 0x3
#define R_CW_BEGIN_M 0x4
#define R_CCW_BEGIN_M 0x5
const unsigned char ttable[6][4] = {
// R_START (00)
{R_START_M, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CCW_BEGIN
{R_START_M | DIR_CCW, R_START, R_CCW_BEGIN, R_START},
// R_CW_BEGIN
{R_START_M | DIR_CW, R_CW_BEGIN, R_START, R_START},
// R_START_M (11)
{R_START_M, R_CCW_BEGIN_M, R_CW_BEGIN_M, R_START},
// R_CW_BEGIN_M
{R_START_M, R_START_M, R_CW_BEGIN_M, R_START | DIR_CW},
// R_CCW_BEGIN_M
{R_START_M, R_CCW_BEGIN_M, R_START_M, R_START | DIR_CCW},
};
#else
#define R_CW_FINAL 0x1
#define R_CW_BEGIN 0x2
#define R_CW_NEXT 0x3
#define R_CCW_BEGIN 0x4
#define R_CCW_FINAL 0x5
#define R_CCW_NEXT 0x6
const unsigned char ttable[7][4] = {
// R_START
{R_START, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CW_FINAL
{R_CW_NEXT, R_START, R_CW_FINAL, R_START | DIR_CW},
// R_CW_BEGIN
{R_CW_NEXT, R_CW_BEGIN, R_START, R_START},
// R_CW_NEXT
{R_CW_NEXT, R_CW_BEGIN, R_CW_FINAL, R_START},
// R_CCW_BEGIN
{R_CCW_NEXT, R_START, R_CCW_BEGIN, R_START},
// R_CCW_FINAL
{R_CCW_NEXT, R_CCW_FINAL, R_START, R_START | DIR_CCW},
// R_CCW_NEXT
{R_CCW_NEXT, R_CCW_FINAL, R_CCW_BEGIN, R_START},
};
#endif
byte rowPins[NUMROWS] = {21,20,19,18,15};
byte colPins[NUMCOLS] = {14,16,10,9,8};
Keypad buttbx = Keypad( makeKeymap(buttons), rowPins, colPins, NUMROWS, NUMCOLS);
Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID,
JOYSTICK_TYPE_JOYSTICK, 32, 0,
false, false, false, false, false, false,
false, false, false, false, false);
void setup() {
Joystick.begin();
rotary_init();}
void loop() {
CheckAllEncoders();
CheckAllButtons();
}
void CheckAllButtons(void) {
if (buttbx.getKeys())
{
for (int i=0; i<LIST_MAX; i++)
{
if ( buttbx.key[i].stateChanged )
{
switch (buttbx.key[i].kstate) {
case PRESSED:
case HOLD:
Joystick.setButton(buttbx.key[i].kchar, 1);
break;
case RELEASED:
case IDLE:
Joystick.setButton(buttbx.key[i].kchar, 0);
break;
}
}
}
}
}
void rotary_init() {
for (int i=0;i<NUMROTARIES;i++) {
pinMode(rotaries[i].pin1, INPUT);
pinMode(rotaries[i].pin2, INPUT);
#ifdef ENABLE_PULLUPS
digitalWrite(rotaries[i].pin1, HIGH);
digitalWrite(rotaries[i].pin2, HIGH);
#endif
}
}
unsigned char rotary_process(int _i) {
unsigned char pinstate = (digitalRead(rotaries[_i].pin2) << 1) | digitalRead(rotaries[_i].pin1);
rotaries[_i].state = ttable[rotaries[_i].state & 0xf][pinstate];
return (rotaries[_i].state & 0x30);
}
void CheckAllEncoders(void) {
for (int i=0;i<NUMROTARIES;i++) {
unsigned char result = rotary_process(i);
if (result == DIR_CCW) {
Joystick.setButton(rotaries[i].ccwchar, 1); delay(50); Joystick.setButton(rotaries[i].ccwchar, 0);
};
if (result == DIR_CW) {
Joystick.setButton(rotaries[i].cwchar, 1); delay(50); Joystick.setButton(rotaries[i].cwchar, 0);
};
}
}