zhomeslice:
I have succeeded in triggering all at the same time using interrupts#define TriggerPin 2 // output pin all trigger pins are linked to.
#define SamplesToAverage 1 // number of ping samples to average together for use
#define DelayBetweenPings 15 // delay after ping data is completely recieved all have reported in and the next trigger pulse in miliseconds (5 seems to be great)
unsigned long Timer, zTimer, xTimer; // Delay timers
volatile unsigned long SampleAge[20];
volatile int PinArray[20] = { -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1, -1}; // List of pins that could be used as ping inputs:
unsigned long PingTime[20] ;
volatile int ToCompleteCtr;
volatile unsigned long PingTimeX[20];
volatile int PingSamplesX[20];
volatile unsigned long edgeTime[20];
volatile uint8_t PCintLast[3];
volatile uint8_t mask[3];
int PinMask[3];
float Measurements[20] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0};
byte *MeasurementsB;
bool SerialEvent = false; // Detects serial imput 1
int I2CsendDataGo = 0;
uint8_t dataB[32] ;
int c, Pin;
int x = 0;
float inches, cm;
int DegSpread = 0;
static int SensorCount = 0;
volatile byte PinList[25];
void setup() {
Serial.begin(115200);
Serial.println("Send 1 for Readable Data, Send 0 For Interger Data");
SensorCount = 0;
pinMode(TriggerPin, OUTPUT);
// enable interrupt for pin...
// Select the pins you want to use for input
// pciSetup(0); // Serial Communication
// pciSetup(1); // Serial Communication
// pciSetup(2); //This is my trigger pin
pciSetup(3);
pciSetup(4);
pciSetup(5);
pciSetup(6);
pciSetup(7);
pciSetup(8);
pciSetup(9);
// pciSetup(10);
// pciSetup(11); // SPI communications
// pciSetup(12); // SPI communications
// pciSetup(13); // SPI communications
// pciSetup(14); // A0
// pciSetup(15); // A1
// pciSetup(16); // A2
// pciSetup(17); // A3
// pciSetup(18); // A4 i2c Communication
// pciSetup(19); // A5 i2c Communication
// pciSetup(20); // A6 for some clones
// pciSetup(21); // A7 for some clones
}
void loop() {
Timer = millis(); // timing events!
PingIt(); // Manage ping data
if (SerialEvent) SendSerialData();
}
void RadarOut( int Degrees) {
static int x = 0;
static bool xz = true;
static byte Sensor = 0;
int deg = Degrees / SensorCount;
Sensor = 0;
while (Sensor < SensorCount) {
if (Degrees > 0) {
Serial.print((Sensor * deg) );
if (Degrees != SensorCount) {
Serial.print("*");
}
Serial.print("=");
} else {
Serial.print("Pin#");
Serial.print(PinList[Sensor]);
Serial.print("=");
}
Serial.print(Measurements[Sensor]);
Serial.print("cm ");
Sensor++;
}
}
void PingTrigger(int Pin) {
digitalWrite(Pin, LOW);
delayMicroseconds(1);
digitalWrite(Pin, HIGH); // Trigger another pulse
delayMicroseconds(5);
digitalWrite(Pin, LOW);
}
bool AllClear() {
return (!(PinMask[0] & PIND) && !(PinMask[1] & PINB) && !(PinMask[2] & PINC) && !ToCompleteCtr); // all the input pins are LOW
}
void PingIt() {
static int SampleCt = 0;
static bool DelayLatch = true;
if ( AllClear()) { // Wait
if (DelayLatch) {
xTimer = Timer + DelayBetweenPings;
DelayLatch = false;
}
if ((Timer - xTimer) >= 0 ) {
for (int i = 0; i < 20; i++) {
if (SampleCt >= SamplesToAverage) {
byte Sensor = 0;
// Serial.print(i);
if ((PinArray[i] != -1) ) {
//Serial.println("");
// Serial.println(PingTimeX[i]);
if (PingSamplesX[i] > 0) {
// Serial.println(PingSamplesX[i]);
// Serial.println("\t");
// Serial.println(PingTimeX[i]);
PingTime[i] = (unsigned long) (PingTimeX[i] / PingSamplesX[i]); // average
Measurements[Sensor] = (float) (microsecondsToCentimeters(PingTime[i]));
}
PingTimeX[i] = 0;
PingSamplesX[i] = 0;
Sensor++;
}
}
SampleCt = 0;
SampleAge[i] = micros();
}
DelayLatch = true;
SampleCt++;
PingTrigger(TriggerPin); // Send another ping
zTimer = Timer;
}
}
}
float microsecondsToInches(long microseconds)
{
return (float) microseconds / 74 / 2;
}
float microsecondsToCentimeters(long microseconds)
{
return (float)microseconds / 29 / 2;
}
void SendSerialData()
{
SerialEvent = false;
int val = Serial.read() - '0';
while (Serial.available())Serial.read();
if (val == 0) {
DataMessage();
Serial.write(dataB, 30); // respond with message
} else if (val == 1) {
RadarOut( DegSpread);
Serial.println();
}
}
uint8_t DataMessage() {
int x = 0;
for (int i = 0; i < 15; i++ ) {
dataB[x] = (uint8_t)(((uint8_t)Measurements[i]) >> 8);
x++;
dataB[x] = (uint8_t)Measurements[i];
x++;
}
}
// port change Interrupt
ISR(PCINT0_vect) { //this ISR pins 8~13
static uint8_t pin;
static unsigned long cTime;
cTime = micros(); // micros() return a uint32_t
pin = PINB; // get the state of all pins bit 0 = pin 8, bit 1 = pin 9 dtc.
ToCompleteCtr++;
sei(); // re enable other interrupts
CheckTimers(8, 13, 1, pin, cTime);
}
ISR(PCINT1_vect) { //this ISR s A0~A5
static uint8_t pin;
static unsigned long cTime;
cTime = micros(); // micros() return a uint32_t
pin = PINC; // get the state of all pins bit 0 = pin 8, bit 1 = pin 9 dtc.
ToCompleteCtr++;
sei(); // re enable other interrupts
CheckTimers(14, 19, 2, pin, cTime);
}
ISR(PCINT2_vect) { //this ISR pins 0-7
static uint8_t pin;
static unsigned long cTime;
cTime = micros(); // micros() return a uint32_t
pin = PIND; // get the state of all pins bit 0 = pin 8, bit 1 = pin 9 dtc.
ToCompleteCtr++;
sei(); // re enable other interrupts
CheckTimers(0, 7, 0, pin, cTime);
}
void CheckTimers(uint8_t StartPin, uint8_t EndPin, uint8_t group, uint8_t pin, unsigned long cTime )
{
volatile uint16_t dTime;
mask[group] = pin ^ PCintLast[group];
PCintLast[group] = pin;
for (uint8_t ii = 0; ii <= (EndPin - StartPin); ii++) {
if (mask[group] >> ii & 1) { // pin has changed
if ((pin >> ii & 1))edgeTime[(ii + StartPin)] = cTime;
else { // Pulse Went low calculate the duratoin
dTime = cTime - edgeTime[(ii + StartPin)]; // Calculate the change in time
PingTimeX[(ii + StartPin)] = PingTimeX[(ii + StartPin)] + dTime;
PingSamplesX[(ii + StartPin)]++;
}
}
}
ToCompleteCtr--; //when all interupts are complete this will return to zero
}
// Install Pin change interrupt for a pin, can be called multiple times
void pciSetup(byte pin)
{
if (pin <= 7)PinMask[0] = bitWrite(PinMask[0], pin, 1); // PIND for pins 0~7
else if (pin > 13) PinMask[2] = bitWrite(PinMask[2] , pin - 14, 1); // PINC for A0~A5 Starts on Pin 14
else PinMask[1] = bitWrite(PinMask[1] , pin - 8, 1); // PINB for pins 8~13
pinMode(pin, INPUT);// enable interrupt for pin...
*digitalPinToPCMSK(pin) |= bit (digitalPinToPCMSKbit(pin)); // enable pin
PCIFR |= bit (digitalPinToPCICRbit(pin)); // clear any outstanding interrupt
PCICR |= bit (digitalPinToPCICRbit(pin)); // enable interrupt for the group
PinArray[pin] = 1;
PinList[SensorCount] = pin;
SensorCount++;
}
void serialEvent() {
SerialEvent = true;
}
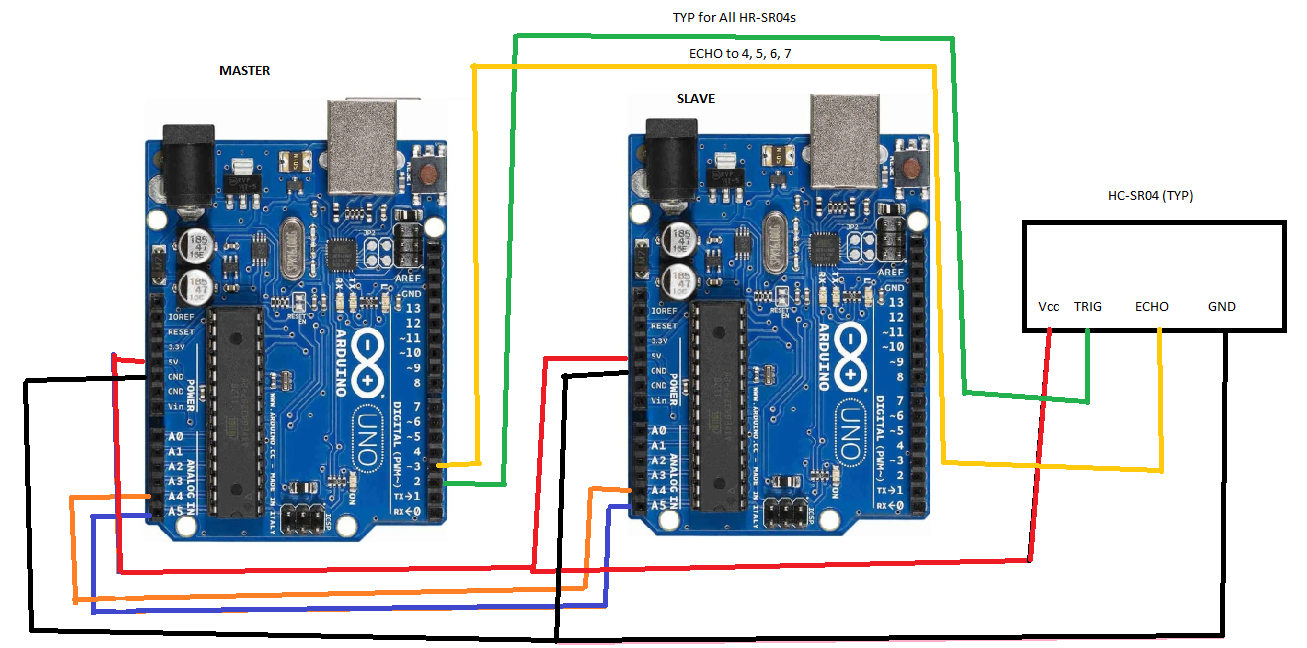
this is my setup each echo pin goes to a unique input and pin 2 is tied to all trigger pins all triggers activate at once  my code can handle multiple pin changes at the same time and log the start time. when each echo pin restores the interrupts trigger again and store the end time giving the trip distance. amazingly accurate. my setup uses 8 sensors I can't see why you couldn't use more you can attach to any pin including analog for example if you want to use analog pin 3 unremark: pciSetup(17); // A3 data is stored in an array available for you to access at will. and this is a non blocking script so other code can run at the same time.
Hello there!
By chance, do you have the same code for an Arduino Uno(atmega328p) ?? I'm having trouble looking at the registers and functionalities of each pins.
Thanks in advance!