I'm using an ADS1115 to measure the characteristaics of a three terminal device. In this example a 4N35.
This is the circuit
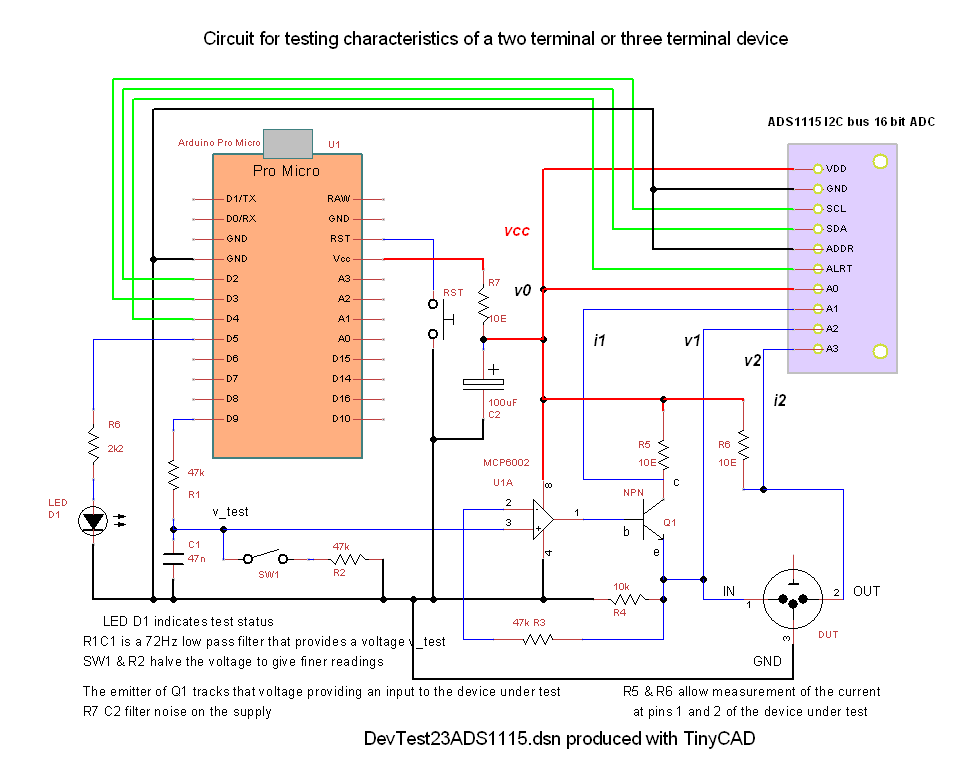
A0 measures Vcc
A1 measures i1 using A0-A1 differential
A2 measures V1
A3 measures V2 and A0 - A3 measures i2
I cant use differential mode because it only works on A0-A1 or A2-A3.
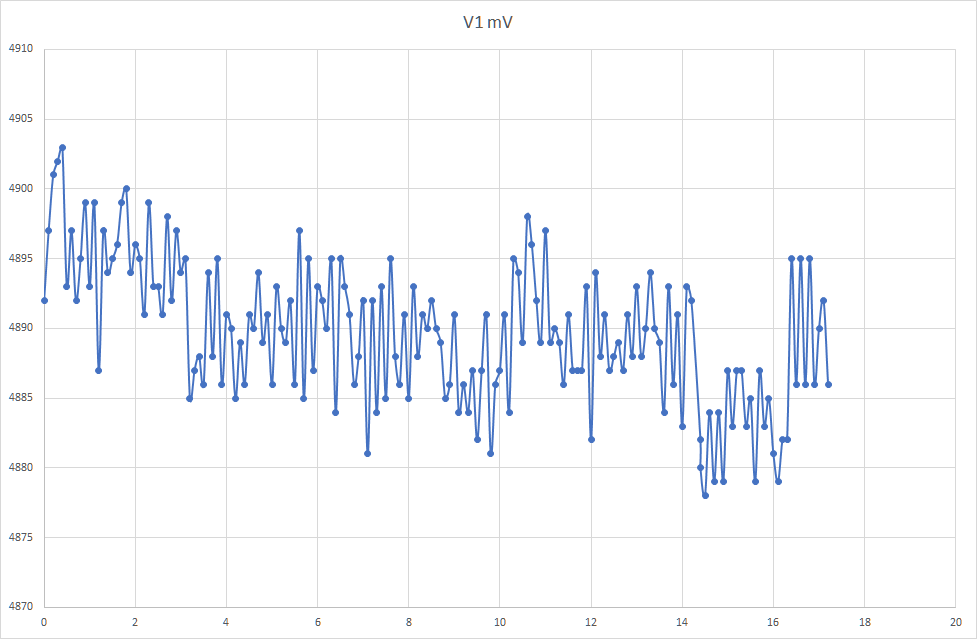
Annoyingly, I'm seeing a lot of noise on the reading for i2 - which I believe is indicative of noise on the GND-Vcc supply; but I've put an RC filter on with little if any improvement.
I've considered the layout; Vdd, A0, C2+ R5 and R6 are all on the same track.
The noise on the i2 measurement is still present if T2 of the DUT is disconnected.
Example data: the 0.019mV on iDUT is 1 lsb so ignore. The 0.356mV on iT3 is 19 lsb.
| nOut | vDUT | iDUT | iT3 | vT3 |
|---|---|---|---|---|
| 0 | 22.7 | 0 | 0 | 5031.7 |
| 2 | 22.7 | 0 | 0 | 5030.1 |
| 4 | 36.4 | 0 | 0.356 | 5027.2 |
| 6 | 55.5 | 0 | 0 | 5027.2 |
| 8 | 75 | 0 | 0 | 5028 |
| 10 | 95.1 | 0.019 | 0 | 5029.7 |
| 12 | 114.9 | 0.019 | 0.356 | 5025.6 |
| 14 | 135.2 | 0 | 0 | 5026.5 |
| 16 | 155.6 | 0 | 0 | 5027.1 |
| 18 | 175.9 | 0 | 0.056 | 5027.2 |
| 20 | 196.1 | 0 | 0 | 5029.5 |
| 22 | 216.4 | 0.019 | 0.056 | 5028.7 |
| 24 | 236.4 | 0 | 0.038 | 5026.1 |
Here is the code (sorry there's a lot of commented out)
#include <Adafruit_ADS1X15.h>
//modified from example because Micro Pro uses different pins for scl & sda
// The library has 'getDataRate' and 'setDataRate' commands. Use them to check the sampling rate and set another.
/*
*** Micro Pro and ADS1115 used for testing two (2) terminal or three (3) terminal devices.
*** generates a voltage using a fast PWM wave at 31kHz and RC filter
*** buffers the voltage with an op amp and emitter follower
*** measures device voltage and device current
*** see diagrams rropamptest ads1115.dsn && devtest23ADS1115.dsn tinyCAD
*** skillbank March 2023
*/
Adafruit_ADS1115 ads; /* Use this for the 16-bit version */
//Adafruit_ADS1015 ads; /* Use this for the 12-bit version */
#define RATE_ADS1115_8SPS (0x0000) ///< 8 samples per second
#define RATE_ADS1115_16SPS (0x0020) ///< 16 samples per second
#define RATE_ADS1115_32SPS (0x0040) ///< 32 samples per second
#define RATE_ADS1115_64SPS (0x0060) ///< 64 samples per second
#define RATE_ADS1115_128SPS (0x0080) ///< 128 samples per second (default)
#define RATE_ADS1115_250SPS (0x00A0) ///< 250 samples per second
#define RATE_ADS1115_475SPS (0x00C0) ///< 475 samples per second
#define RATE_ADS1115_860SPS (0x00E0) ///< 860 samples per second
//SDA to D2 and SCL to D3; ALERT to D4; ADDR not connected
// Pin connected to the ALERT/RDY signal for new sample notification.
constexpr int READY_PIN = 4;
//state indicator
byte LED = 5; //LED on pin 5
bool ON = HIGH; //LED is ON when pin is HIGH
bool OFF = LOW;
//generating PWM signal
constexpr byte vOutPin = 9; // using pin 9 for pwm out
const int divider = 1; //PWM: for pin 9 divider=1 sets pwm freq at 31,250Hz; = 8 sets it to 3,906Hz
//with emitter follower compliance runs out at 4400mV approx
int nMax = 225; // value is the duty cycle of the pwm ie 255 = always 1, 0 = always off. 2v5=128
int nMin = 000; //0 to start at 0V
int stepSize = 2; //each step is an increment of about 20mV at DUT
int nOut; //number to be output via PWM
int tSettle = 200; //msec to allow PWM to stabilise
//calculating expected output voltage at filter
float mVoltsOut;
//vCal calibrates the indication of output voltage in mV
//float vCal = 19.53; // mV out = nOut * Vcc mV / 256 5000 /256 = 19.53
float vCal = 19.5; //mV out - from EXCEL trend line
int vOffset = 12; // mV out - from EXCEL trend line
//measuring current
int tInt = 4; //interval between readings
int rIsense = 10; //value of current measuring resistor
int rIsense3 = 10; //value of current measuring resistor for T3
float iDUT; //current in device under test
float iT3; //current through terminal 3 eg collector of transistor
float iDUTthreshold = 0.04; //current (mA) above which finer steps will be taken note 0.019 or 0.038 is noise level
float iT3threshold = 0.1; //current (mA) above which finer steps will be taken
//*** threshold - take fewer readings below threshold to reduce unnecessary data
int iLimit = 20; //end test when iLimit is reached
void setPwmFrequency(int pin, int divisor);
// This is required on ESP32 to put the ISR in IRAM. Define as
// empty for other platforms. Be careful - other platforms may have
// other requirements.
#ifndef IRAM_ATTR
#define IRAM_ATTR
#endif
volatile bool new_data = false;
void IRAM_ATTR NewDataReadyISR() {
new_data = true;
}
void setup(void) {
Serial.begin(115200);
pinMode(LED, OUTPUT); //led & resistor on pin 5 to show test status
Serial.println("Starting test on device");
digitalWrite(LED, ON); //LED on, pause before test starts
analogWrite(vOutPin, nMin); //generate minimum voltage for test
delay(4000); //time to allow vout to settle to vMin, and start serial monitor (termite, needs cts/rts)
Serial.println("Getting single-ended readings from AIN0..3");
Serial.println("ADC Range: +/- 6.144V (1 bit = 3mV/ADS1015, 0.1875mV/ADS1115)");
// The ADC input range (or gain) can be changed via the following
// functions, but be careful never to exceed VDD +0.3V max, or to
// exceed the upper and lower limits if you adjust the input range!
// Setting these values incorrectly may destroy your ADC!
// ADS1015 ADS1115
// ------- -------
ads.setGain(GAIN_TWOTHIRDS); // 2/3x gain +/- 6.144V 1 bit = 3mV 0.1875mV (default)
// ads.setGain(GAIN_ONE); // 1x gain +/- 4.096V 1 bit = 2mV 0.125mV
// ads.setGain(GAIN_TWO); // 2x gain +/- 2.048V 1 bit = 1mV 0.0625mV
// ads.setGain(GAIN_FOUR); // 4x gain +/- 1.024V 1 bit = 0.5mV 0.03125mV
// ads.setGain(GAIN_EIGHT); // 8x gain +/- 0.512V 1 bit = 0.25mV 0.015625mV
// ads.setGain(GAIN_SIXTEEN); // 16x gain +/- 0.256V 1 bit = 0.125mV 0.0078125mV
if (!ads.begin()) {
Serial.println("Failed to initialize ADS.");
while (1)
;
}
ads.setDataRate(RATE_ADS1115_8SPS);
//ads.setDataRate(RATE_ADS1115_64SPS ); //choose either
setPwmFrequency(vOutPin, divider);
Serial.println("Testing device with rail-rail op amp: generating vOut, measuring vIn");
//turn off built in LEDs by setting them as inputs
pinMode(LED_BUILTIN_TX, INPUT);
pinMode(LED_BUILTIN_RX, INPUT);
}
void loop(void) {
int16_t adc0, adc1, adc2, adc3;
float multiplier = 0.1875F; /* ADS1115 @ +/- 6.144V gain (16-bit results) */
//voltages need to be floats or we lose resolution on iDUT as v2-v1/rIsense
//float volts0, volts1, volts2, volts3;
float mVolts0, mVolts1, mVolts2, mVolts3;
float vDiff, vDiff3; //difference between two readings
delay(500); //time to allow vout to settle to zero and
//Serial.println("nOut, mVoltsOut, vFilter, vDUT, vIsense, Vsupply, vDiff, iDUT");
//Serial.println("nOut, mVoltsOut, vDUT, iDUT, Vload, Iload");
Serial.println("nOut, vDUT, iDUT, iT3, vT3");
digitalWrite(LED, OFF); //LED off, test in progress
for (nOut = nMin; nOut <= nMax; nOut += stepSize) {
// for (nOut = nMax;;){ //used for full scale calibration
//for (nOut = 0;;){ //used for offset null
//for (nOut = 64;;){ //used for freq measurement
analogWrite(vOutPin, nOut); //set output voltage; having set the pwm frequency the analog write obeys that
delay(tSettle);
//calculate expected output voltage at filter
mVoltsOut = (nOut * vCal) + vOffset;
// Serial.print(mVoltsOut, 1);
//Serial.print(", ");
//take numeric readings from adc and convert to mV
adc0 = ads.readADC_SingleEnded(0); //supply voltage
mVolts0 = adc0 * multiplier;
delay(tInt);
adc1 = ads.readADC_SingleEnded(1);
if(adc1 > adc0) adc1 = adc0; //cant be higher voltage than supply
mVolts1 = adc1 * multiplier;
delay(tInt);
adc2 = ads.readADC_SingleEnded(2);
mVolts2 = adc2 * multiplier;
delay(tInt);
adc3 = ads.readADC_SingleEnded(3);
if(adc3 > adc0) adc3 = adc0; //cant be higher voltage than supply
mVolts3 = adc3 * multiplier;
delay(tInt);
vDiff = ads.readADC_Differential_0_1();
vDiff *= multiplier; //calculate difference voltage in mV between supply and ISense
//calculate current
iDUT = vDiff / rIsense; //
vDiff3 = mVolts0 - mVolts3;
iT3 = vDiff3 / rIsense3;
//*** print results in .csv format:- only need vDUT vs iDUT to plot characteristic
Serial.print(nOut);
Serial.print(", ");
/*
//Diagnostic - used while testing
Serial.print("V supp: ");
Serial.print(mVolts0, 0); //Vsupply
Serial.print(", ");
Serial.print("V rIsense: ");
Serial.print(mVolts1, 1); //v DUT output
Serial.print(", ");
*/
//Serial.print("vDUT: ");
Serial.print(mVolts2, 1); //
Serial.print(", ");
//Serial.print("iDUT: ");
Serial.print(iDUT, 3); //current mA
Serial.print(", ");
//Serial.print("iT3: ");
Serial.print(iT3, 3); //T3 current mA
Serial.print(", ");
//Serial.print("Vt3: ");
Serial.print(mVolts3, 1); //Vterminal2
Serial.print(", ");
//Serial.print("adc0 raw: ");
Serial.print(adc0); //
Serial.print(", ");
//Serial.print("adc1 raw: ");
Serial.print(adc1); //
Serial.print(", ");
//Serial.print("adc2 raw: ");
Serial.print(adc2); //
Serial.print(", ");
//Serial.print("adc3 raw: ");
Serial.print(adc3); //
Serial.print(", ");
// Serial.print("vDiff: ");
// Serial.print(vDiff, 2); //Vdifference
// Serial.print(", ");
Serial.println(); // end of one line of data
//test if getting useful data
if (iDUT > iDUTthreshold) {
// if ((iDUT > iDUTthreshold)||(iT3 > iT3threshold)) {
stepSize = 1;
}
if ((iDUT > iLimit)||(iT3 > iLimit)) {
nOut = 0;
Serial.println("current limit exceeded, terminating test");
analogWrite(vOutPin, nOut); //*** NB turn off voltage to device so as not to leave it stressed
break;
}
} //finished test
while (1) { //flash LED to show test finished
digitalWrite(LED, ON); //LED on,
delay(50);
digitalWrite(LED, OFF); //LED on,
delay(1000);
}
}
/**
Divides a given PWM pin frequency by a divisor.
The resulting frequency is equal to the base frequency divided by
the given divisor:
- Base frequencies:
o The base frequency for pins 3, 9, 10, and 11 is 31250 Hz.
o The base frequency for pins 5 and 6 is 62500 Hz.
- Divisors:
o The divisors available on pins 5, 6, 9 and 10 are: 1, 8, 64,
256, and 1024.
o The divisors available on pins 3 and 11 are: 1, 8, 32, 64,
128, 256, and 1024.
PWM frequencies are tied together in pairs of pins. If one in a
pair is changed, the other is also changed to match:
- Pins 5 and 6 are paired on timer0
- Pins 9 and 10 are paired on timer1
- Pins 3 and 11 are paired on timer2
Note that this function will have side effects on anything else
that uses timers:
- Changes on pins 3, 5, 6, or 11 may cause the delay() and
millis() functions to stop working. Other timing-related
functions may also be affected.
- Changes on pins 9 or 10 will cause the Servo library to function
incorrectly.
Thanks to macegr of the Arduino forums for his documentation of the
PWM frequency divisors. His post can be viewed at:
https://forum.arduino.cc/index.php?topic=16612#msg121031
*/
void setPwmFrequency(int pin, int divisor) {
byte mode;
if (pin == 5 || pin == 6 || pin == 9 || pin == 10) {
switch (divisor) {
case 1: mode = 0x01; break;
case 8: mode = 0x02; break;
case 64: mode = 0x03; break;
case 256: mode = 0x04; break;
case 1024: mode = 0x05; break;
default: return;
}
if (pin == 5 || pin == 6) {
TCCR0B = TCCR0B & 0b11111000 | mode;
} else {
TCCR1B = TCCR1B & 0b11111000 | mode;
}
}
}