Hi. I am building an rc car which i want to control using nrf24l01 and arduino. I am using 3 servo motors one each to control steering, brake and throttle for ic engine. For the same i intend to use a motor shield but cannot find relevant info how to connect both nrf24l01 and motor shield to the receiving arduino and make them work seemlessly.
Also how do i identify network availability on the receiver side? I want the car to stop in case rf communication is not avail for 2 seconds
I got my nRF24s working with this Tutorial. I think it illustrates the connections clearly.
I suggest you use the TMRh20 version of the RF24 library - it solves some problems from the ManiacBug version
The pair of programs in this link may be useful and may do most of what you require.
If the Arduino on your car expects to get a message (say) 10 times per second it can count missing messages and when the count reaches 20 it shuts down the motor.
...R
Hi Robin,
But my first question remains still unanswered. How do I connect Nrf24l01 transceiver and L293D motor shield on the same Arduino Uno board? From all the forums I have read, all say it cannot be done. ??? ![]()
What L293D motor shield are you using?
Those that came up on a search use pin 11 and pin 12, so you can not use SPI.
The library Robin2 linked to seems to support SoftSPI on different pins, but I never used that feature.
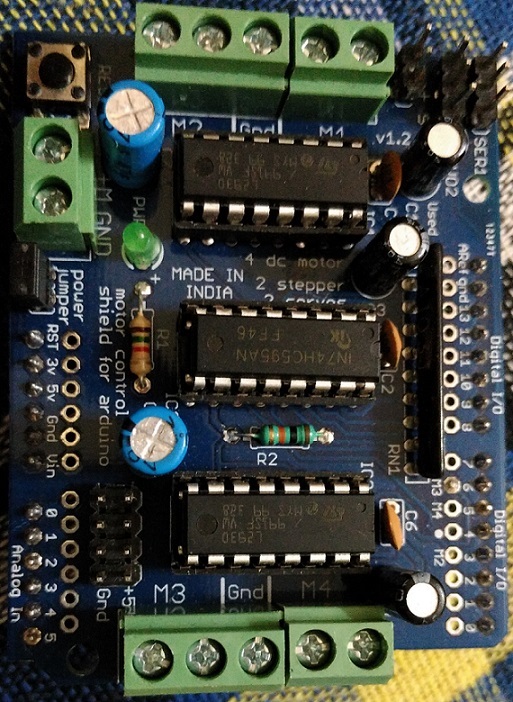
If you can see on that picture whether pin 11, 12 or 13 are used, you have better eyes than me.
sagargarg:
But my first question remains still unanswered. How do I connect Nrf24l01 transceiver and L293D motor shield on the same Arduino Uno board? From all the forums I have read, all say it cannot be done.
You did not say in your Original Post that you believed there was a problem - how was I to know?
Simplest answer is probably not to use the motor shield and get motor drivers that give you a choice of connections. You don't need any shield for servos.
...R
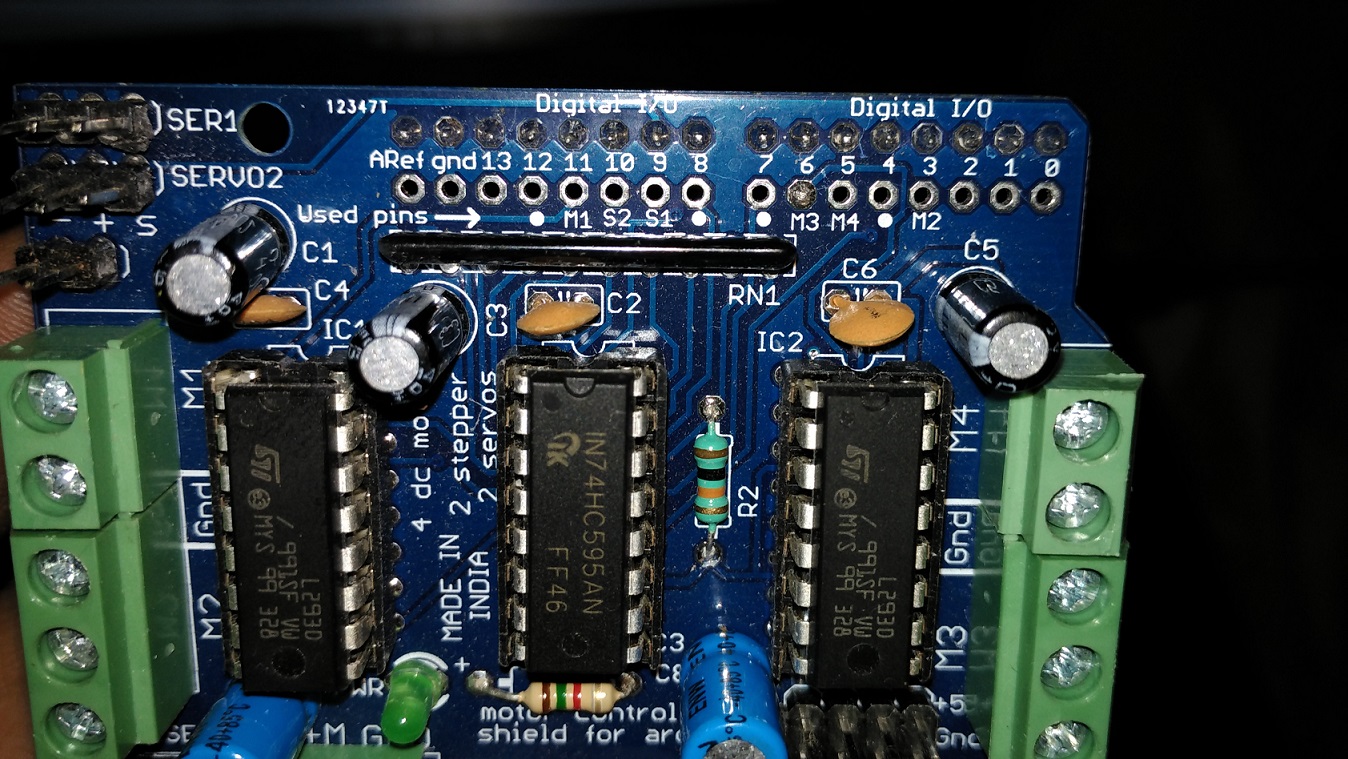
So it seems 12, 11, and 10 are used.
You could try SoftSPI on the free pins (analog pins are probably unused).