Coucou les amiiiiiis ! J'ai envie de pleurer... ![]()
Vous voyez quand vous avez galéré pendant plusieurs mois et que vous avez la sensation d'avoir atteint votre but. Et là, chute sur la dernière marche avant la ligne d'arrivée.
Suite à votre aide et à la résolution des différents problèmes relatifs à mon projet, mes servos moteurs sont fonctionnels (Alimentation Arduino + Servos via PCA9685), mes interrupteurs aussi (Pbl récupération état interrupteurs multiples), et mes capteurs de flexions aussi (Arduino + Capteur Flexion). Enfin... Je dis mes capteurs de flexion aussi... Sans compter ce problème de l'espace qui vient perturber ma joie d'avoir penser que tous mes problèmes étaient derrière moi.
C'était le dernier test avant de refermer le socle de mon bras robotisé. Je branche le connecteur de mon gant comprenant les capteurs de flexion... Je teste le pouce, impeccable, l'index, impeccable, le majeur, impeccable, l'annulaire, impeccable. Et là, je me dis "Hourrraaaa, 4 sur 5, aucune raison que l'auriculaire ne fonctionne pas"... Et voilà qu'il me sort des valeurs qui me laissent penser que j'ai pu me louper sur la résistance mise derrière le capteur.
Voilà les valeurs que j'obtiens avec les 4 doigts fonctionnels (en position de base dépliée) :

Et voilà ce que j'obtiens avec l'auriculaire :

Donc je vérifie ma résistance, aucun soucis, c'est bien une résistance de 10k comme les autres.
Comme vous pouvez le voir, j'ai serti les pin 5 analogiques sur un connecteur mâle histoire d'être propre et de simplifier le montage/démontage en cas de problème. Donc les broches du connecteur femelle sont soudées sur une breadbord via des câbles directement à l'arduino. Je suis certain de mes soudures maintenant que j'ai mes lunettes loupes de la mort qui tue. Mais dans le doute, je bypass cette partie pour mes tests en calant directement des fils dupont dans mon connecteur mâle comme vous pouvez le voir ci-dessous, et je les branche sur mon arduino en mode connecteur dupont aussi :


J'obtiens malheureusement le même comportement...
J'ai un autre arduino identique sous la main, j'effectue donc ce même test, et là, CA FONCTIONNE SANS AUCUN PROBLEME !!
Je teste sur la broche A5 au lieu de A4 de l'arduino sur lequel ça ne fonctionne pas au cas ou le problème provienne de là, mais même résultat...
J'en conclue donc qu'un élément connecté à l'arduino vient modifier le comportement normal que devrait avoir mes 5 capteurs pour ne faire fonctionner que les 4 premiers... (peut-être que je fais fausse route, mais là, je sèche)
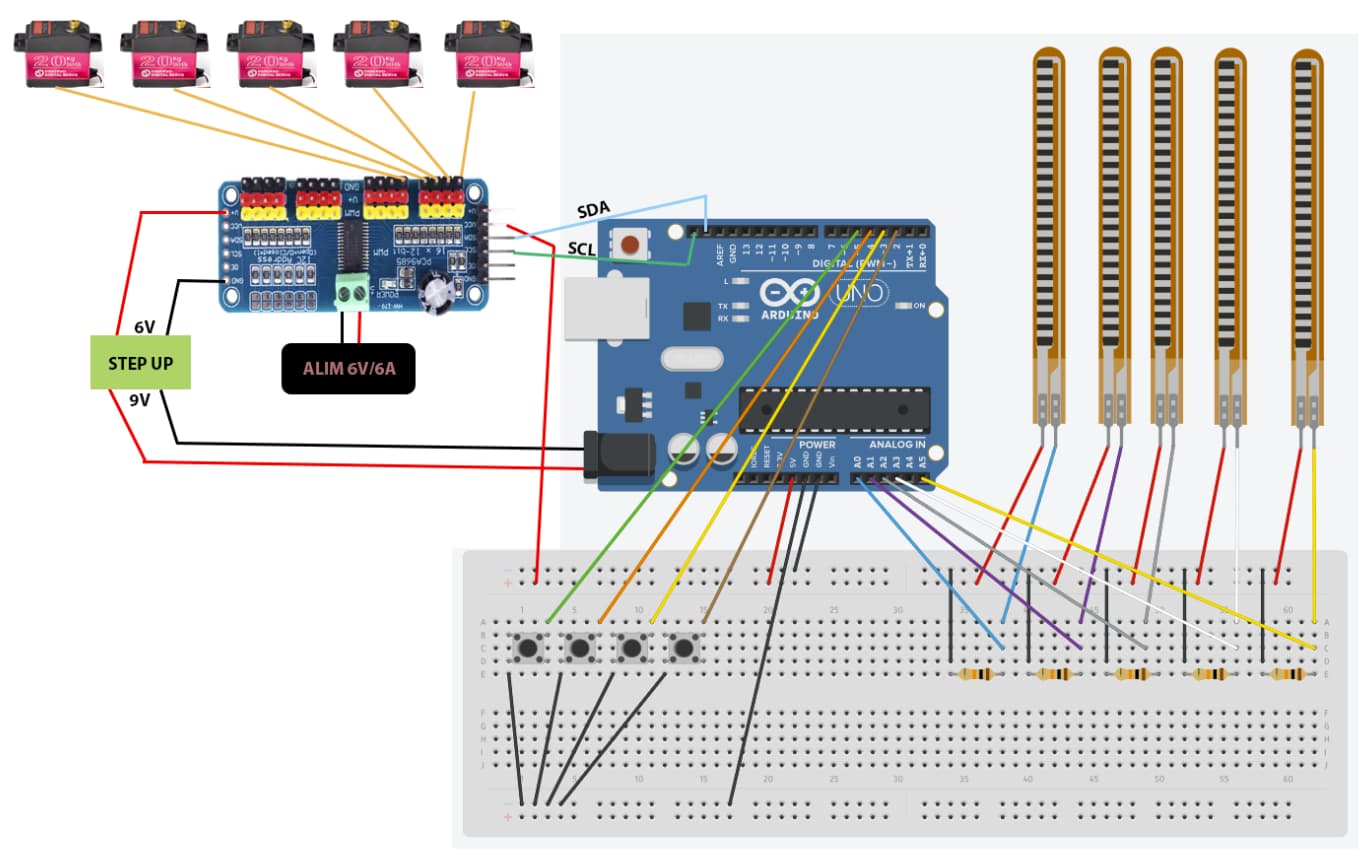
J'ai donc effectué un schéma le plus propre possible avec le peu de technique que j'ai histoire que vous puissiez voir l'ensemble des connexions que composent mon projet :
J'ai bien entendu testé de déconnecter un maximum d'éléments de mon montage, comme cela :

Donc je repasse directement par l'alimentation de l'usb pour laquelle mes tests sont fonctionnels avec l'autre arduino histoire d'être ISO. Mais résultat identique...
Et par contre, en plus de cela, je tente de déconnecter les 3 câbles restants, à savoir les câbles de communication SDA, SCL, et aussi le VCC du PCA9685 sur lequel sont connectés mes servos :

Et là, mon programme bloque au démarrage, il ne me sort plus d'output...
Pour que mon programme fonctionne, il faut absolument que le SDA, SCL et VCC soient branchés à l'arduino ![]()
Je suis complètement paumé pour changer...
Si je vous ai manqué (depuis hier ![]() ) et que vous avez une idée sur l'origine de mon problème, je suis preneur comme à mon habitude. J'espère que ce n'est pas l'arduino qui a un pète au casque, car j'ai mis 30 plombes à faire toutes mes soudures au poil de c... arotte...
) et que vous avez une idée sur l'origine de mon problème, je suis preneur comme à mon habitude. J'espère que ce n'est pas l'arduino qui a un pète au casque, car j'ai mis 30 plombes à faire toutes mes soudures au poil de c... arotte...
Merci encore par avance !!
Un bon week-end à tous en attendant ![]()