Je me (re)lance...
je t'ai fait un graph pour t'expliquer comment ton signal va être transformé en passant par un module analogique :
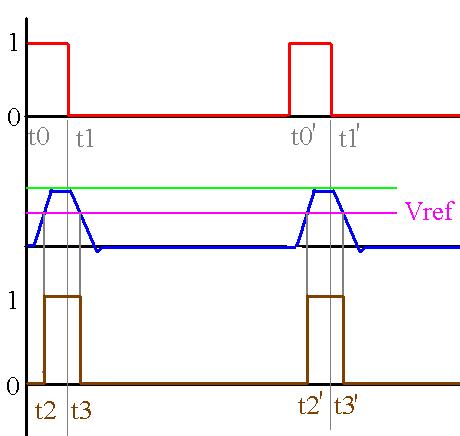
en haut et en rouge : le signal d'origine, du bon vrai logique, qui passe à 1 à l'instant t0 (et t0') et repasse à 0 pour t1 (et t1'). il n'a rien d'analogique, le changement d'état est tellement rapide qu'il devient immédiat.
au milieu, la sortie de ton circuit analogique : l'analogique ne peut pas recopier un brutal changement de valeur de l'entrée, car son slew-rate est limité à qq dizaines voire qq centaines de µV/s selon la qualité et le prix (pente de la courbe bleue : il ne peut pas monter plus vite que ça). la ligne violette est la référence pour laquelle le circuit qui reçoit le signal (servo par exemple) va considérer si c'est un 1 ou un 0 (la courbe bleue au dessus : c'est un 1, en dessous, c'est un 0.
En bas, ce que va interpréter le servo. comme ton circuit analogique n'a pas les mêmes slew-rate en montée et en descente, la courbe marron n'est pas la même que la rouge d'origine, et surtout, t3-t2 n'est pas du tout égal à t1-t0!!! manque de bol, c'est justement la durée de l'impulsion (t3-t2) qui détermine la position du servo. Je te laisse deviner les dégâts...
Bref, si on peut se dire que t2'-t2 = t0'-t0 (temps entre deux impulsions), la durée de l'impulsion n'est pas conservée. Comme quoi, l'analogique ne conserve pas les valeurs temporelles!
Dans mon exemple, j'ai mis Vref au milieu, il faut savoir que ce n'est pas toujours le cas. imagine si Vref = 0.3 x Vcc (un tiers), alors descends la ligne violette, et imagine que l'impulsion obtenue pourrait durer beaucoup plus que celle de départ...
Un circuit logique a un temps de réponse de l'ordre de la nS (nano-seconde, 1 ns = 0.001µs), soit 10 000 à 50 000 fois plus rapide que le circuit analogique... là, ce temps de réponse devient négligeable devant la précision du servo.
il existe tout un tas de circuits répondant à tout un tas de besoins... il faut se fixer un besoin, et si le circuit n'existe pas, alors il faut modifier le besoin. C'est l'avantage de la bidouille! Dans l'industrie, on le fait fabriquer, ce circuit.
Bon courage!




