Hi,
I'm going to connect a closed loop hybrid stepper servo motor below to a
HBS57 stepper driver.
This will connect to my Arduino Pro Mini.
I wanted to avoid using a level shifter so now I will try to use the 5v vs 3.3v version of the Pro Mini.
The driver says it can accept 5-24V signals.
The issue is I need to connect the driver to a PC with a USB to RS232 connector in order to configure it.
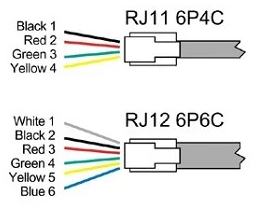
I can't figure out based on the manual if it's an RJ-12 connection or RJ-11.
I'm assuming it's RJ-12, but the manual says NC, NC at the beginning and end connection.
I can't determine if this stands for no wires or something else.
NEMA17 closed loop hybrid servo
The link to their software (in need of translation):
HBS57 software needs english version
This youtube video is the closest thing I could find to help with translation:


HBS57 Manual.pdf (221 KB)