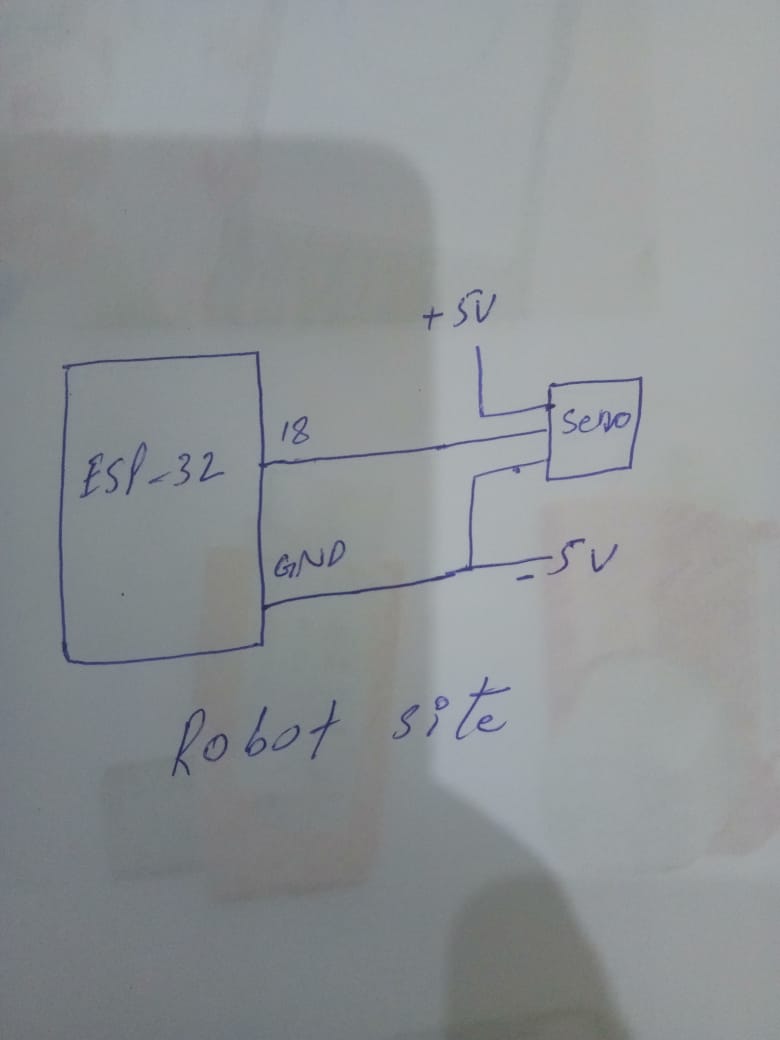
I'm working on a robot controlled by a remote via ESPNOW (two way) protocol. The robot has three stepper motor,1 dc motor and 1 servo motor. The problem is servo is not working even if the values (jaw) for it are being transmitted by the remote. below are the codes for both the remote and robot:
Remote:
//--------------------------------------------
//ESP32 remote via ESP-NOW Protocol
//Transmit joy vals- fsr val
//--------------------------------------------
#include <esp_now.h>
#include <WiFi.h>
#include <ESP32MX1508.h>
//------------------------------------------------------------
#define open_pin 12
//FEEDBACK MOTOR
#define ROTA 4
#define ROTB 15
#define CH1 0
#define CH2 1
#define RES 12
MX1508 motorA(ROTA, ROTB, CH1, CH2, RES); //object for yrot motor
int motorSpeedMin = 0;
int motorSpeedMax = 4095;
// Define FSR threshold and motor speed limits
const int fsrThreshold = 500; // Adjust thresho
int fsrVal = 0;
//// Yrotation button pins
#define CW_BUTTON_PIN 25
#define ACW_BUTTON_PIN 26
//joystick pins
#define x 32
#define y 33
#define z 34
//#define y2 35
//STATES
#define FWD 2
#define REV 1
#define STOP 0
#define OPEN 0
#define CLOSE 1
#define CW 1
#define ACW 2
byte xState = 0;
byte yState = 0;
byte zState = 0;
byte jawState = 0;
byte rotState = 0;
byte lastxState = 0;
byte lastyState = 0;
byte lastzState = 0;
byte lastjawState = 0;
byte lastrotState = 0;
bool move = false;
#define dead_pos 700
#define dead_neg -700
int map_x = 0;
int map_y = 0;
int map_z = 0;
int map_y2 = 0;
int val_jaw = 0;
int val_cw = 0;
int val_acw = 0;
//------------------------------------------------------------
uint8_t RxMACaddress[] = {0xC0, 0x49, 0xEF, 0xD0, 0xDB, 0xB8};
//------------------------------------------------------------
typedef struct TxStruct
{
byte xData = STOP;
byte yData = STOP;
byte zData = STOP;
bool jaw = CLOSE;
byte rot = STOP;
} TxStruct;
TxStruct sentData;
//------------------------------------------------------------
typedef struct RxStruct
{
int fsr;
} RxStruct;
RxStruct receivedData;
esp_now_peer_info_t peerInfo;
//------------------------------------------------------------
void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len)
{
memcpy(&receivedData, incomingData, sizeof(receivedData));
haptics();
}
//===================functions===================================================================
//state change for x link
void change_x() {
if (map_x < dead_neg || map_x > dead_pos) {
if (map_x > dead_pos) {
xState = FWD;
} else if (map_x < dead_neg) {
xState = REV;
}
}
else {
xState = STOP;
}
return;
}
//state change for y link
void change_y() {
if (map_y < dead_neg || map_y > dead_pos) {
if (map_y > dead_pos) {
yState = FWD;
} else if (map_y < dead_neg) {
yState = REV;
}
}
else {
yState = STOP;
}
return;
}
//state change for z link
void change_z() {
if (map_z < dead_neg || map_z > dead_pos) {
if (map_z > dead_pos) {
zState = FWD;
} else if (map_z < dead_neg) {
zState = REV;
}
}
else {
zState = STOP;
}
return;
}
//state change for jaw
void change_jaw() {
if (val_jaw == LOW ) {
jawState = OPEN;
}
else {
jawState = CLOSE;
}
//return;
}
//state change for ROTATION
void change_rot() {
if (val_cw == LOW and val_acw == HIGH ) {
rotState = CW;
}
else if (val_cw == HIGH and val_acw == LOW ) {
rotState = ACW;
}
else {
rotState = STOP;
}
//return;
}
//state for haptics
void haptics() {
fsrVal = receivedData.fsr;
// Map FSR value to motor speed
//int motorSpeed = map(fsrVal, fsrThreshold, 4095, motorSpeedMin, motorSpeedMax);
// Limit motor speed within the defined range
//motorSpeed = constrain(motorSpeed, motorSpeedMin, motorSpeedMax);
// Set motor speed
motorA.motorGo(fsrVal);
}
//======================================================================================
// preparing and sending data
void cast() {
if (xState != lastxState || yState != lastyState || zState != lastzState || jawState != lastjawState || rotState != lastrotState) { //This makes the async xTX data flow
sentData.xData = xState;
sentData.yData = yState;
sentData.zData = zState;
sentData.jaw = jawState;
sentData.rot = rotState;//Cast the changed state to the xTX callback
//sending
esp_err_t result = esp_now_send(RxMACaddress, (uint8_t *) &sentData, sizeof(sentData));
// getting feedback message
//feedback();
if (result == ESP_OK) {
char x_buf[20];
char y_buf[20];
char z_buf[20];
char j_buf[20];
char r_buf[20];
String sx, sy, sz, sj, sr = "";
if (xState == FWD) {
sx = "X_REV";
} else if (xState == REV) {
sx = "X_FWD";
} else if (xState == STOP) {
sx = "X_STOP";
}
if (yState == FWD) {
sy = "Y_REV";
} else if (yState == REV) {
sy = "Y_FWD";
} else if (yState == STOP) {
sy = "Y_STOP";
}
if (zState == FWD) {
sz = "Z_REV";
} else if (zState == REV) {
sz = "Z_FWD";
} else if (zState == STOP) {
sz = "Z_STOP";
}
if (jawState == OPEN) {
sj = "OPEN";
} else if (jawState == CLOSE) {
sj = "CLOSED";
}
if (rotState == CW) {
sr = "CW";
} else if (rotState == ACW) {
sr = "ACW";
} else if (rotState == STOP) {
sr = "NO ROT";
}
sprintf(x_buf, "Sending %s", sx);
sprintf(y_buf, "Sending %s", sy);
sprintf(z_buf, "Sending %s", sz);
sprintf(j_buf, "Sending %s", sj);
sprintf(r_buf, "Sending %s", sr);
Serial.println(x_buf);
Serial.println(y_buf);
Serial.println(z_buf);
Serial.println(j_buf);
Serial.println(r_buf);//Only prints when packet is sent
} else {
Serial.println("Failed to send data over ESP-NOW");
}
}
}
//======================================================================================
void setup()
{
Serial.begin(115200);
pinMode(open_pin, INPUT_PULLUP);
pinMode(CW_BUTTON_PIN, INPUT_PULLUP);
pinMode(ACW_BUTTON_PIN, INPUT_PULLUP);
motorA.motorBrake();
//----------------------------------------------------------
WiFi.mode(WIFI_STA);
//----------------------------------------------------------
if (esp_now_init() != ESP_OK)
{
Serial.println("Error initializing ESP-NOW");
return;
}
//----------------------------------------------------------
// esp_now_peer_info_t peerInfo;
memcpy(peerInfo.peer_addr, RxMACaddress, 6);
peerInfo.channel = 0;
peerInfo.encrypt = false;
//----------------------------------------------------------
if (esp_now_add_peer(&peerInfo) != ESP_OK)
{
Serial.println("Failed to add peer");
return;
}
//----------------------------------------------------------
esp_now_register_recv_cb(OnDataRecv);
}
//======================================================================================
void loop()
{
//reading values
val_jaw = digitalRead(open_pin);
val_cw = digitalRead(CW_BUTTON_PIN);
val_acw = digitalRead(ACW_BUTTON_PIN);
int val_x = analogRead(x);
int val_y = analogRead(y);
int val_z = analogRead(z);
//int val_y2 = analogRead(y2);
//mapping
map_x = map(val_x, 0, 4095, -1000, 1000);
map_y = map(val_y, 0, 4095, -1000, 1000);
map_z = map(val_z, 0, 4095, -1000, 1000);
//map_y2 = map(val_y2, 0, 4095, -1000, 1000);
//----------------------------------------------------------
// observing state change
change_x();
change_y();
change_z();
change_jaw();
change_rot();
//casting, sending and getting feedback
cast();
//----------------------------------------------------------
lastxState = xState;
lastyState = yState;
lastzState = zState;
lastjawState = jawState;
lastrotState = rotState;
//----------------------------------------------------------
//delay(1000);
}
Robot:
//--------------------------------------------
//ESP32 robot via ESP-NOW Protocol
//Transmit fsr - receive joyvals
//--------------------------------------------
#include "AccelStepper.h"
#include <ESP32MX1508.h>
#include <ESP32Servo.h>
#include <esp_now.h>
#include <WiFi.h>
#include <Wire.h>
//------------------------------------------------------------
// Yrotation driver pins
#define ROTA 12
#define ROTB 14
#define CH1 0
#define CH2 1
#define RES 12
MX1508 motorA(ROTA, ROTB, CH1, CH2, RES); //object for yrot motor
#define XSTEP 23
#define XDIR 22
#define YSTEP 33
#define YDIR 32
#define ZSTEP 26
#define ZDIR 25
#define DRIVER 1
AccelStepper stepperX(DRIVER, XSTEP, XDIR);
AccelStepper stepperY(DRIVER, YSTEP, YDIR);
AccelStepper stepperZ(DRIVER, ZSTEP, ZDIR);
int servoPin = 18;
Servo myservo;
//int fsrValue = 0;
//STATES
#define FWD 2
#define REV 1
#define STOP 0
#define OPEN 0
#define CLOSE 1
#define CW 1
#define ACW 2
//------------------------------------------------------------
uint8_t RxMACaddress[] = {0xEC, 0x62, 0x60, 0x9A, 0x62, 0x60};
//------------------------------------------------------------
typedef struct TxStruct
{
int fsr;
} TxStruct;
TxStruct sentData;
//------------------------------------------------------------
typedef struct RxStruct
{
byte xData = STOP;
byte yData = STOP;
byte zData = STOP;
bool jaw = CLOSE;
byte rot = STOP;
} RxStruct;
RxStruct receivedData;
byte lastxState = 0;
byte lastyState = 0;
byte lastzState = 0;
byte lastjawState = 0;
byte lastrotState = 0;
//byte lastfsrValue = 0;
bool xmove = false;
bool ymove = false;
bool zmove = false;
esp_now_peer_info_t peerInfo;
//------------------------------------------------------------
void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len)
{
memcpy(&receivedData, incomingData, sizeof(receivedData));
if (lastxState != receivedData.xData || lastyState != receivedData.yData || lastzState != receivedData.zData || lastjawState != receivedData.jaw || lastrotState != receivedData.rot) {
// moving x
if (receivedData.xData == FWD) {
stepperX.setSpeed(500);
xmove = true;
} else if (receivedData.xData == REV) {
stepperX.setSpeed(-500);
xmove = true;
} else if (receivedData.xData == STOP) {
xmove = false;
stepperX.stop();
}
// moving y
if (receivedData.yData == FWD) {
stepperY.setSpeed(500);
ymove = true;
} else if (receivedData.yData == REV) {
stepperY.setSpeed(-500);
ymove = true;
} else if (receivedData.yData == STOP) {
ymove = false;
stepperY.stop();
}
//Moving Z
if (receivedData.zData == FWD) {
stepperZ.setSpeed(500);
zmove = true;
} else if (receivedData.zData == REV) {
stepperZ.setSpeed(-500);
zmove = true;
} else if (receivedData.zData == STOP) {
zmove = false;
stepperZ.stop();
}
// jaw
if (receivedData.jaw == OPEN) {
myservo.write(0);
} else {
myservo.write(180);
}
// rot
if (receivedData.rot == CW) {
motorA.motorGo(4095);
} else if (receivedData.rot == ACW) {
motorA.motorRev(4095);
}
else if (receivedData.rot == STOP) {
motorA.motorBrake();
}
lastxState = receivedData.xData;
lastyState = receivedData.yData;
lastzState = receivedData.zData;
lastjawState = receivedData.jaw;
lastrotState = receivedData.rot;
}
// lastxState = receivedData.xData;
// lastyState = receivedData.yData;
// lastzState = receivedData.zData;
// lastjawState = receivedData.jaw;
// lastrotState = receivedData.rot;
}
//======================================================================================
void setup()
{
Serial.begin(115200);
myservo.attach(servoPin, 500, 2400);
pinMode(34, INPUT);
stepperX.setMaxSpeed(1000);
stepperX.setAcceleration(30);
stepperX.setSpeed(50);
stepperX.stop();
stepperY.setMaxSpeed(1000);
stepperY.setAcceleration(30);
stepperY.setSpeed(50);
stepperY.stop();
stepperZ.setMaxSpeed(1000);
stepperZ.setAcceleration(30);
stepperZ.setSpeed(50);
stepperZ.stop();
//----------------------------------------------------------
WiFi.mode(WIFI_STA);
if (esp_now_init() != ESP_OK)
{
Serial.println("Error initializing ESP-NOW");
return;
}
//----------------------------------------------------------
memcpy(peerInfo.peer_addr, RxMACaddress, 6);
peerInfo.channel = 0;
peerInfo.encrypt = false;
//----------------------------------------------------------
if (esp_now_add_peer(&peerInfo) != ESP_OK)
{
Serial.println("Failed to add peer");
return;
}
//----------------------------------------------------------
esp_now_register_recv_cb(OnDataRecv);
}
//======================================================================================
void loop()
{
// put your main code here, to run repeatedly:
if (xmove) {
stepperX.runSpeed();
}
if (ymove) {
stepperY.runSpeed();
}
if (zmove) {
stepperZ.runSpeed();
}
//reading fsr
sentData.fsr = analogRead(34);
esp_err_t result = esp_now_send(RxMACaddress, (uint8_t *) &sentData, sizeof(sentData));
//----------------------------------------------------------
if (result == ESP_OK) Serial.println("Sent with success");
else Serial.println("Error sending the data");
}
I've tested the servo individually on ESPNOW and it works but in the final code it doesn't work.