Hello,
I am fairly new to Arduino. I am using an Arduino uno with an Arduino motor shield rev3 to power two dc motor that each have a rated voltage of 7.2V. I'm using a Dagu Rover 5 as shown in the attached filed. My first question is, I know it is recommended to connect the power to the shield, but in the Arduino website, it recommend to cut off the Vin connector in the back of the shield. Do I need to do this for this situation?
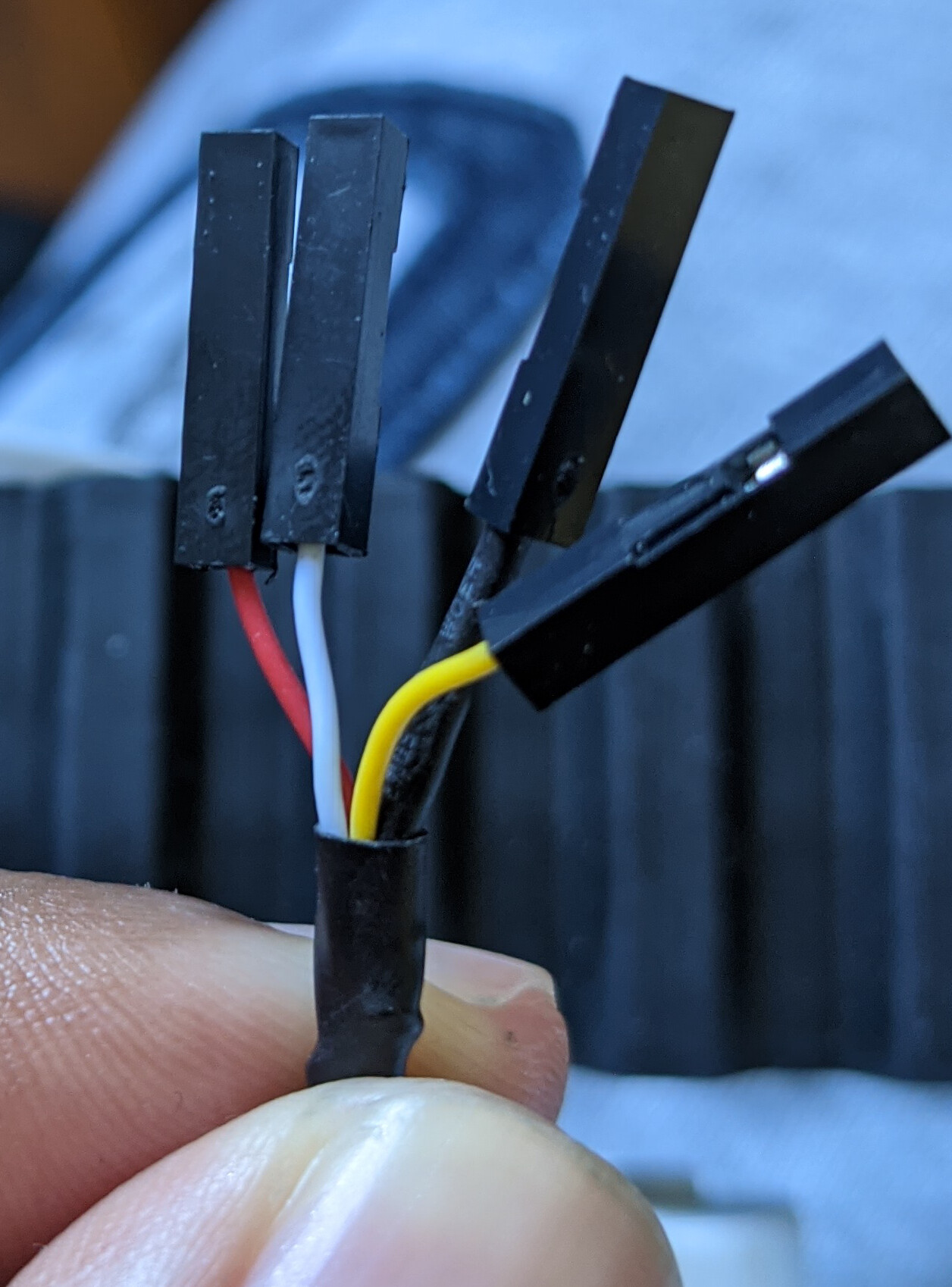
.My next question is setting up the motor encoders. Both motor use hall effect and have 4 pins as shown in the pic. I know red is power and black is grounding but I believe the white and yellow are the sensors output.
The goal of this is to set up an odometer for ROS so the program can detect how far from its starting point it has traveled. If anyone has dealt with this or has any advice, please feel free to message here