Salve a tutti sono luca, sono qui con un progetto che vorrei condividere con voi e sperare nel vostro interesse per svilupparlo (se ovviamente trovate qualche scopo in esso).
E' più che un oggetto un concept che racchiude i primi passi per fare un range finder o il peggior scanner 3D.
Negli allegati potete vedere le foto del oggetto in questione:
Il sistema panTilt con con stepper e i relativi supporti (poi uploaderò anche i disegni e come lavorare l'acetato) con montato sopra il sensore ad ultrasuoni.
I driver e il lettore di schede SD che permette di salvare tutti i dati sulla scheda.
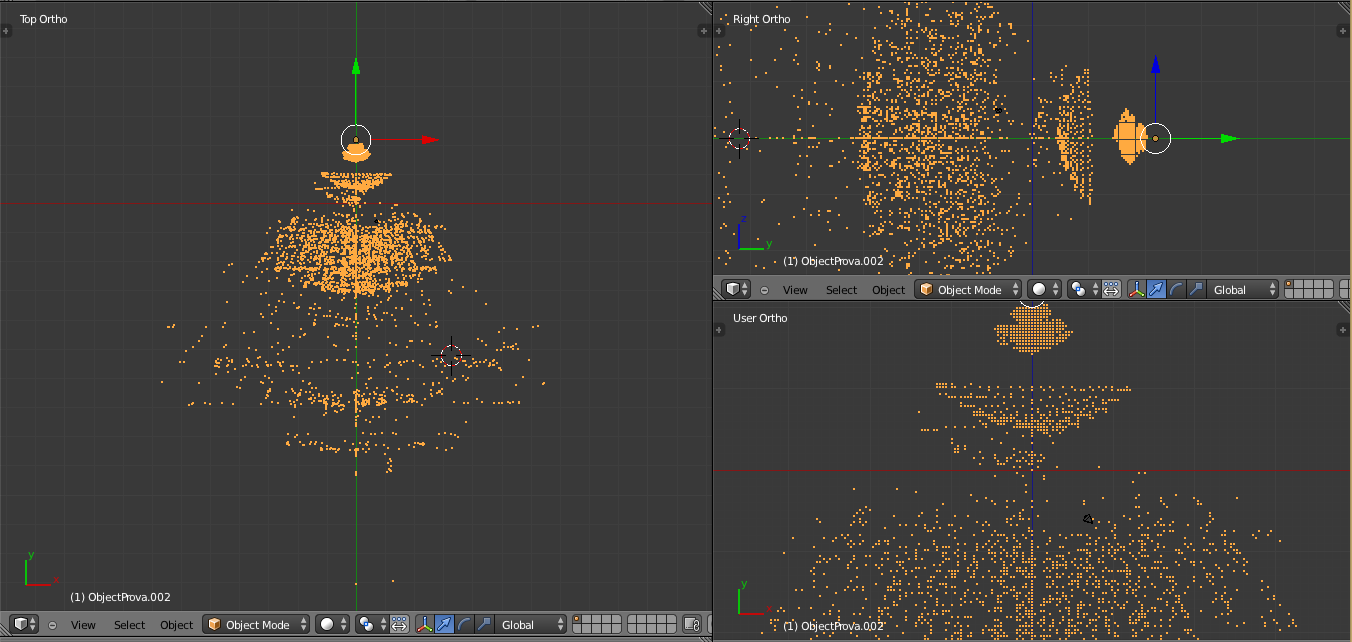
Una volta effettuata la scansione si ha un file contenente dei dati grezzi da processare,quindi un applicativo (java-processing quel che è) :
cordinatePolari -> cordinateCartesiane -> File OBJ
Il file OBJ può essere aperto da qualsiasi programma di grafica 3D (ad es. Blender) e sempre negli allegati possiamo vedere un piccolo test (è una vista cartesiana di x,y,z).
Se pensate che questo oggetto abbia una profonda dubbia utilità lo posso capire, ma credo che condividere con voi i miei passaggi per arrivare alla fine possono essere d'aiuto per qualcuno.
Ovviamente non ho scritto tutto tutto perchè volevo sentire se qualcuno fosse interessato se no non finivo più ![]()
AH GIUSTO ! Parlando di costi il tutto NON mi è costato più di 20 Euro il che fa già capire con qualcosa di più cosa si potrebbe fare (ovviamente l'Arduino non l ho contato nel costo).