Hello, I would very appreciate it if anyone can help me to fix the problem with my code.
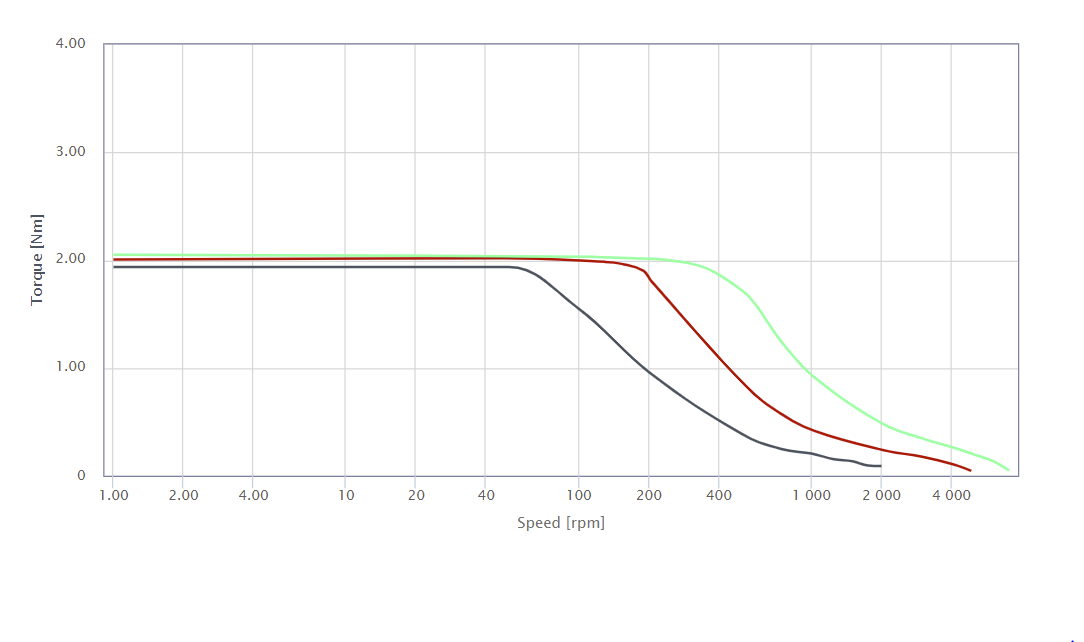
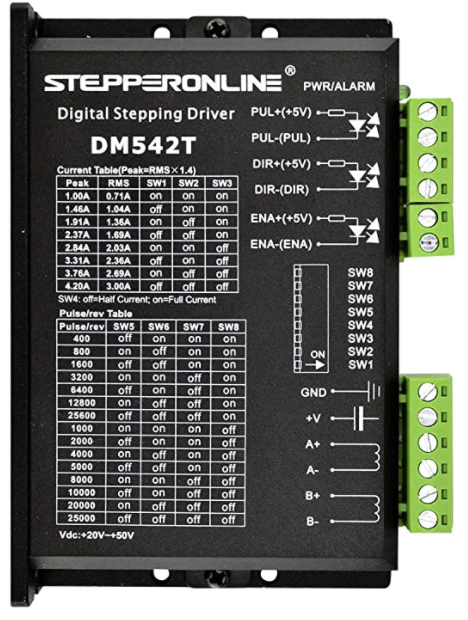
I am using Arduino to control a stepper Motor but whenever i put load on the platform (supposed to be lifted by the stepper Motor) the Motor shaft rotate reverse and loses steps. the motor is supposed to deliver 2 Nm as Torque. I am using the driver DM542 and using this code:
//Transforming the motor's rotary motion into linear motion by using a threaded rod:
//Threaded rod's pitch = 2 mm. This means that one revolution will move the nut 2 mm.
//Default stepping = 400 step/revolution.
// 400 step = 1 revolution = 8 mm linear motion. (4 start 2 mm pitch screw)
// 1 cm = 10 mm =>> 10/8 * 400 = 4000/8 = 500 steps are needed to move the nut by 1 cm.
//character for commands
/*
'C' : Prints all the commands and their functions.
'P' : Rotates the motor in positive (CW) direction, relative.
'N' : Rotates the motor in negative (CCW) direction, relative.
'R' : Rotates the motor to an absolute positive position (+).
'r' : Rotates the motor to an absolute negative position (-).
'S' : Stops the motor immediately.
'A' : Sets an acceleration value.
'L' : Prints the current position/location of the motor.
'H' : Goes back to 0 position from the current position (homing).
'U' : Updates the position current position and makes it as the new 0 position.
*/
#include <AccelStepper.h>
//User-defined values
long receivedSteps = 0; //Number of steps
long receivedSpeed = 0; //Steps / second
long receivedAcceleration = 0; //Steps / second^2
char receivedCommand;
//-------------------------------------------------------------------------------
int directionMultiplier = 1; // = 1: positive direction, = -1: negative direction
bool newData, runallowed = false; // booleans for new data from serial, and runallowed flag
AccelStepper stepper(1, 8, 9);// direction Digital 9 (CCW), pulses Digital 8 (CLK)
void setup()
{
Serial.begin(9600); //define baud rate
Serial.println("Demonstration of AccelStepper Library"); //print a messages
Serial.println("Send 'C' for printing the commands.");
//setting up some default values for maximum speed and maximum acceleration
Serial.println("Default speed: 400 steps/s, default acceleration: 800 steps/s^2.");
stepper.setMaxSpeed(400); //SPEED = Steps / second
stepper.setAcceleration(800); //ACCELERATION = Steps /(second)^2
stepper.disableOutputs(); //disable outputs
}
void loop()
{
//Constantly looping through these 2 functions.
//We only use non-blocking commands, so something else (should also be non-blocking) can be done during the movement of the motor
checkSerial(); //check serial port for new commands
RunTheMotor(); //function to handle the motor
}
void RunTheMotor() //function for the motor
{
if (runallowed == true)
{
stepper.enableOutputs(); //enable pins
stepper.run(); //step the motor (this will step the motor by 1 step at each loop)
}
else //program enters this part if the runallowed is FALSE, we do not do anything
{
stepper.disableOutputs(); //disable outputs
return;
}
}
void checkSerial() //function for receiving the commands
{
if (Serial.available() > 0) //if something comes from the computer
{
receivedCommand = Serial.read(); // pass the value to the receivedCommad variable
newData = true; //indicate that there is a new data by setting this bool to true
if (newData == true) //we only enter this long switch-case statement if there is a new command from the computer
{
switch (receivedCommand) //we check what is the command
{
case 'P': //P uses the move() function of the AccelStepper library, which means that it moves relatively to the current position.
receivedSteps = Serial.parseFloat(); //value for the steps
receivedSpeed = Serial.parseFloat(); //value for the speed
directionMultiplier = 1; //We define the direction
Serial.println("Positive direction."); //print the action
RotateRelative(); //Run the function
//example: P2000 400 - 2000 steps (5 revolution with 400 step/rev microstepping) and 400 steps/s speed
//In theory, this movement should take 5 seconds
break;
case 'N': //N uses the move() function of the AccelStepper library, which means that it moves relatively to the current position.
receivedSteps = Serial.parseFloat(); //value for the steps
receivedSpeed = Serial.parseFloat(); //value for the speed
directionMultiplier = -1; //We define the direction
Serial.println("Negative direction."); //print action
RotateRelative(); //Run the function
//example: N2000 400 - 2000 steps (5 revolution with 400 step/rev microstepping) and 500 steps/s speed; will rotate in the other direction
//In theory, this movement should take 5 seconds
break;
case 'R': //R uses the moveTo() function of the AccelStepper library, which means that it moves absolutely to the current position.
receivedSteps = Serial.parseFloat(); //value for the steps
receivedSpeed = Serial.parseFloat(); //value for the speed
directionMultiplier = 1; //We define the direction
Serial.println("Absolute position (+)."); //print the action
RotateAbsolute(); //Run the function
//example: R800 400 - It moves to the position which is located at +800 steps away from 0.
break;
case 'r': //r uses the moveTo() function of the AccelStepper library, which means that it moves absolutely to the current position.
receivedSteps = Serial.parseFloat(); //value for the steps
receivedSpeed = Serial.parseFloat(); //value for the speed
directionMultiplier = -1; //We define the direction
Serial.println("Absolute position (-)."); //print the action
RotateAbsolute(); //Run the function
//example: r800 400 - It moves to the position which is located at -800 steps away from 0.
break;
case 'S': // Stops the motor
stepper.stop(); //stop motor
stepper.disableOutputs(); //disable power
Serial.println("Stopped."); //print action
runallowed = false; //disable running
break;
case 'A': // Updates acceleration
runallowed = false; //we still keep running disabled, since we just update a variable
stepper.disableOutputs(); //disable power
receivedAcceleration = Serial.parseFloat(); //receive the acceleration from serial
stepper.setAcceleration(receivedAcceleration); //update the value of the variable
Serial.print("New acceleration value: "); //confirm update by message
Serial.println(receivedAcceleration); //confirm update by message
break;
case 'L': //L: Location
runallowed = false; //we still keep running disabled
stepper.disableOutputs(); //disable power
Serial.print("Current location of the motor: ");//Print the message
Serial.println(stepper.currentPosition()); //Printing the current position in steps.
break;
case 'H': //H: Homing
runallowed = true;
Serial.println("Homing"); //Print the message
GoHome();// Run the function
break;
case 'U':
runallowed = false; //we still keep running disabled
stepper.disableOutputs(); //disable power
stepper.setCurrentPosition(0); //Reset current position. "new home"
Serial.print("The current position is updated to: "); //Print message
Serial.println(stepper.currentPosition()); //Check position after reset.
break;
case 'C':
PrintCommands(); //Print the commands for controlling the motor
break;
default:
break;
}
}
//after we went through the above tasks, newData is set to false again, so we are ready to receive new commands again.
newData = false;
}
}
void GoHome()
{
if (stepper.currentPosition() == 0)
{
Serial.println("We are at the home position.");
stepper.disableOutputs(); //disable power
}
else
{
stepper.setMaxSpeed(400); //set speed manually to 400. In this project 400 is 400 step/sec = 1 rev/sec.
stepper.moveTo(0); //set abolute distance to move
}
}
void RotateRelative()
{
runallowed = true; //allow running - this allows entering the RunTheMotor() function.
stepper.setMaxSpeed(receivedSpeed); //set speed
stepper.move(directionMultiplier * receivedSteps); //set relative distance and direction
}
void RotateAbsolute()
{
runallowed = true; //allow running - this allows entering the RunTheMotor() function.
stepper.setMaxSpeed(receivedSpeed); //set speed
stepper.moveTo(directionMultiplier * receivedSteps); //set relative distance
}
}
thank you all