#include <EEPROM.h>
#include "SPI.h"
#include <LedControl.h>
#include "elapsedMillis.h"
#define MAX_DEVICES 1
// Pins for MAX7219 connections
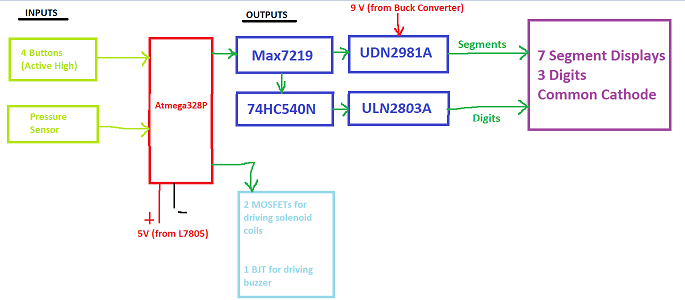
#define DATA_IN 8 // Pin for DATA IN
#define LOAD 7 // Pin for LOAD (CS)
#define CLOCK 6 // Pin for CLOCK (CLK)
// Create an LedControl object
LedControl lc = LedControl(DATA_IN, CLOCK, LOAD, MAX_DEVICES);
int m_sec;
byte pres_sensor = A3;
int sensorvalue=0;
float pres_target0,pres_target=30.0, pres_ini_multipleS =1;
boolean pres_filling,pres_draining, name_disp , pres_complete =0, Mode_init =0 ,name_erase=0, Font, pros_start =0;
uint8_t blink_counter=0, pres_est_reset =200, stay_counter=0, name_check =0;
byte tyre_counter =0, reevaluation_inf, name_change = 0;
String retrievedString, retrievedString2;
char rx_byte = 0;
String rx_str;
int tar_pres_up, tar_pres_down, MenuCancel, refill;
byte air_supply=3;
byte buzzer= 4;
byte air_drain=5;
float total =0, average=0;
int numReadings = 0;
bool isPOfShown = false;
bool PDPI = false;
bool TIIS = false;
bool ASSF = false;
bool ADDF = false;
byte P_Ofst = EEPROM.read(50);
byte PDPipe = EEPROM.read(60);
byte Ti_S = EEPROM.read(70);
//byte Ti_D = EEPROM.read(80);
byte AS_F = EEPROM.read(90);
byte AD_F = EEPROM.read(100);
byte E_Font = EEPROM.read(120);
byte S_Vol = EEPROM.read(130);
byte D_Vol = EEPROM.read(140);
byte R_time = EEPROM.read(150);
byte name_disp_ram=1;
int refill_time = R_time *1000;
int tyre_c62500 = EEPROM.read(169);
int tyre_c250 = EEPROM.read(170);
int tyre_c1 = EEPROM.read(171);
uint8_t Menu = 0;
float Pressure_offset = P_Ofst -100;
double t_tyre_count;
unsigned long time_initial_S = 0;
unsigned long time_initial_D = 0;
byte air_supply_factor = AS_F; // Initial Time Determination Factor
byte air_drain_factor = AD_F;
byte time_lapse_S = Ti_S; // Initial lapse to counter small pressure difference
byte t_settling = 150;
byte t_d = 150;
long int est_inf_time=0, est_def_time=0, pres_inf_est0 =0, pres_inf_est1 =0, pres_def_est0 =0, pres_def_est1 =0;
float pres_check,pres_settling, pres_tyre_stable_ref, pres_val, pres_psi, pres_psi0, pres_bar, pres_pas, pres_volt,pres_tyre_diff, pres_inf_diff_ini, pres_def_diff_ini, pres_tyre_cur, pres_fill_ini0, pres_fill_ini1, pres_fill_ini2, pres_drain_ini0, pres_drain_ini1, pres_drain_ini2, pres_tyre_diff1=0;
String v1,d1;
byte i=0;
byte mno=0,num_offset=15;
float psi[15],pres_offset=0;
void setup()
{
Serial.begin(115200);
analogReference(EXTERNAL);
lc.shutdown(0, false); // Wake up display
lc.setIntensity(0, 8); // Set brightness (0-15)
lc.clearDisplay(0); // Clear Display
lc.setDigit(0, 0, 8 , true);
lc.setDigit(0, 1, 8 , true);
lc.setDigit(0, 2, 8 , true);
lc.setDigit(0, 3, 8 , true);
delay(100);
lc.clearDisplay(0);
lc.setRow(0, 0, B01001110);
lc.setRow(0, 1, B11001111);
lc.setDigit(0, 2, 5 , false);
delay(1000);
Serial.println(readStringFromEEPROM(175));
retrievedString = readStringFromEEPROM(230);
Serial.println("NEW SOFTWARE");
Serial.println("Welcome : Enter Security Code...?");
Serial.println(pres_sensor);
pinMode(11,OUTPUT);
pinMode(13,OUTPUT);
pinMode(pres_sensor, INPUT);
pinMode(air_supply, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(air_drain, OUTPUT);
digitalWrite(buzzer, HIGH);
delay_f(500);
lc.clearDisplay(0);
analogWrite(air_supply, 0);
analogWrite(air_drain, 0);
digitalWrite(11, LOW);
digitalWrite(13, LOW);
if(P_Ofst < 79 || P_Ofst > 121){
EEPROM.write(50,100);
delay_f(10);
P_Ofst = EEPROM.read(50);
Pressure_offset = P_Ofst -100;}
delay(100);
t_tyre_count = ((62500EEPROM.read(169)) + (250EEPROM.read(170)) + EEPROM.read(171));
if (tyre_c250 >= 132)
t_tyre_count = 65536 + t_tyre_count;
t_tyre_count /=4;
Serial.print("t_tyre_count : ");
Serial.println(t_tyre_count);
for(i=0;i<num_offset;i++)
psi[i] = 0;
}
void pres_deci(float pressure, float pressure0){
........................Used to show value
}
void showError() {
for (int i = 0; i < 5; i++) { // Blink 3 times
lc.setChar(0, 0, 'E', false);
lc.setRow(0, 1, B00000001);
delay(500);
lc.clearDisplay(0); // Clear the display
delay(500);
}
pres_deci(pres_target,pres_target0); // Return to showing the current counter value
}
void showvalue(int valu){
lc.clearDisplay(0);
for (int i = 2; i >= 0; i--) { // Adjust for 4 digits (starting from the leftmost digit)
int digit = valu % 10; // Extract least significant digit
lc.setDigit(0, i, digit, false); // Display digit without decimal point
valu /= 10; // Shift to next digit
}
}
void pres_sens_read(){
pres_volt = 5.0MovAvg1(pres_sensor)/1023;
pres_psi = (40*pres_volt) - 20;
}
void pres_stabilize(){ // 500 bytes memory
.................
}
void pres_meet_check(){
............................
}
void delay_f(int del){ //600 bytes memory
delay(del);
}
void BDAMP(){
digitalWrite(buzzer, HIGH); //buzzer
delay(15);
digitalWrite(buzzer, LOW);
}
void solenoid_operation_S(byte solenoid_type, unsigned int on_time1){
......................
}
void solenoid_operation_D(byte solenoid_type, unsigned int on_time2){
..................
}
void writeStringToEEPROM(int addrOffset, const String &strToWrite)
{
................
}
void Button_Read(){
tar_pres_up = digitalRead(A1);
tar_pres_down = digitalRead(A0);
MenuCancel = digitalRead(10);
refill = digitalRead(12);
pres_sens_read();
}
void delay_name(int del){ //600 bytes memory
m_sec =0;
delay(del);
}
void Buzzer(){
digitalWrite(buzzer, HIGH); //buzzer
delay_f(40);
digitalWrite(buzzer, LOW); //buzzer
delay_f(40);}
void loop() {
Serial.print(pres_psi);
Serial.print(" ");
Serial.println(pres_offset);
digitalWrite(buzzer, LOW); //b uzzer
analogWrite(air_supply, 0);
analogWrite(air_drain, 0);
digitalWrite(11,LOW);
digitalWrite(13,LOW);
pres_sens_read();
if(abs(pres_psi) > (0.3 + (Pressure_offset/10)))
psi[num_offset] = pres_psi + pres_offset - (Pressure_offset/10);
for(i=0;i<(num_offset);i++){
psi[i] = psi[i+1];
Serial.print(psi[i]);
}
Serial.println(" ");
pres_offset = psi[0];
if ( Mode_init ==0 ){
Button_Read();
work_mode:
pres_deci(pres_target,pres_target0);
pres_target0 = pres_target;
if( tar_pres_up == HIGH && pres_target <= 144){ // REMOTE or BUTTON COMMANDS PLUS PRESSURE LIMITS CHECK
pres_est_reset=0;
pres_target++;
pres_deci(pres_target,pres_target0);pres_target0 = pres_target;
Buzzer();
delay_f(700);
pres_up:
Button_Read();
if( tar_pres_up == HIGH && pres_target <= 144){
pres_target++;
pres_deci(pres_target,pres_target0);pres_target0 = pres_target;
Buzzer();
goto pres_up;}
}
else if( tar_pres_down == HIGH && pres_target >17){ // REMOTE or BUTTON COMMANDS PLUS PRESSURE LIMITS CHECK
pres_est_reset =0;
pres_target--;
pres_deci(pres_target,pres_target0);pres_target0 = pres_target;
Buzzer();
delay_f(700);
pres_down:
Button_Read();
if( tar_pres_down == HIGH && pres_target >17){
pres_target--;
pres_deci(pres_target,pres_target0);pres_target0 = pres_target;
Buzzer();
goto pres_down;}
}
if ((MenuCancel == HIGH) && (refill == LOW) && (pres_psi < 5) ) {
pres_target=30.0;
pres_ini_multipleS =1;
pres_inf_est0=0;
pres_inf_est1=0;
pres_def_est0=0;
pres_def_est1=0;
pres_est_reset =253;
tyre_counter =0;
pres_deci(pres_target,pres_target0);
delay(1000);
Button_Read();
if ((MenuCancel == HIGH) && (refill == HIGH) && (pres_psi < 5)) {
delay_f(2000);
lc.clearDisplay(0);
Menu =20;
Mode_init=1;
}}
if (refill == HIGH && MenuCancel == LOW && Mode_init==0) {
delay(t_d);
Button_Read();
if (refill == HIGH && MenuCancel == LOW) {
lc.clearDisplay(0);
lc.setChar(0, 0, 'F', false);
lc.setDigit(0, 1, 1, false);
// lc.setChar(0, 2, 'L', false);
lc.setChar(0, 2, 'L', false);
Buzzer();
solenoid_operation_S(air_supply, refill_time);
if(pres_psi < 10)
solenoid_operation_S(air_supply, 2*refill_time);
lc.clearDisplay(0);
while (pres_psi < 5){
digitalWrite(buzzer, HIGH); //buzzer
digitalWrite(11,LOW);
digitalWrite(13,LOW);
showError();
Button_Read();
if (tar_pres_up == HIGH || tar_pres_down == HIGH || MenuCancel == HIGH || refill == HIGH){
digitalWrite(buzzer, LOW); //buzzer
lc.clearDisplay(0);
goto work_mode;}
}}
lc.clearDisplay(0);
pres_sens_read();
pres_tyre_diff = pres_target - pres_psi;
while((pres_tyre_diff > (pres_target/3))){
pres_deci(pres_psi,pres_psi0);
time_initial_S = 2.5*pres_target*pres_tyre_diff*0.5*air_supply_factor; //Basic Inflate Check
solenoid_operation_S(air_supply, time_initial_S);
pres_tyre_diff = pres_target - pres_psi;
pres_deci(pres_psi,pres_psi0);
}
time_initial_S=0;
}
if ((MenuCancel == HIGH) && (pres_psi < 10) ) {
delay(200);
Button_Read();
if ((MenuCancel == HIGH) && (tar_pres_down == HIGH ) && (pres_psi < 10)) {
lc.clearDisplay(0);
pres_sens_read();
showvalue(pres_psi);
delay(2000);
showvalue(pres_offset);
delay(2500);
lc.clearDisplay(0);
lc.setChar(0, 0, 'H', false);
lc.setDigit(0, 1, 0 , false);
lc.setChar(0, 2, 'L', false);
lc.setChar(0, 3, 'D', false);
delay(3000);
lc.clearDisplay(0);
}
}
if ((MenuCancel == HIGH) && (pres_psi < 10) ) {
delay(200);
Button_Read();
if ((MenuCancel == HIGH) && (tar_pres_up == HIGH ) && (pres_psi < 10)) {
lc.clearDisplay(0);
lc.clearDisplay(0);
lc.setRow(0,0,B01001110);
lc.setDigit(0,1,0,false);
lc.setRow(0,2,B00111110);
delay(1000);
t_tyre_count = ((62500*EEPROM.read(169)) + (250*EEPROM.read(170)) + EEPROM.read(171));
if (tyre_c250 >= 132){
t_tyre_count = 65536 + t_tyre_count;}
t_tyre_count /=4;
showvalue(t_tyre_count);
delay(4000);
lc.clearDisplay(0);
}}
if ( blink_counter > 10){
blink_counter =0;}
blink_counter++;
delay(1);
}
if (pres_est_reset > 250 || tyre_counter ==4 ){
pres_ini_multipleS =1;
pres_est_reset =253;
tyre_counter =0;
}
pres_est_reset++;
delay_name(50);
if (pres_psi > 5 && MenuCancel == LOW && (Mode_init == 0) ){
digitalWrite(buzzer, HIGH); //buzzer
mno= PDPipe0.5pres_target;
solenoid_operation_S(air_supply, mno);
digitalWrite(buzzer, LOW); //buzzer
delay(10);
pres_meet_check();
}
while (pres_psi > 5 && (Mode_init == 0)){ // Main FILLING DRAINING LOOP
.............(Program do not enter this loop because the problem occurs outside that loop when pres_psi<5)
pres_meet_check();
while ( pres_psi > pres_target) //Drain While Loop
{
.............Mathematical Calculations and Solenoid Coil ON/OFF (Confidential)
}
while ( pres_psi > 5 && pres_psi <= pres_target) //Filling While Loop
{
………….Mathematical Calculations and Solenoid Coil ON/OFF (Confidential)
}
}
if (pres_complete == 1){
lc.clearDisplay(0);
while (pres_complete == 1){
digitalWrite(buzzer, HIGH); //buzzer
digitalWrite(11,LOW);
digitalWrite(13,LOW);
showError();
Button_Read();
if (tar_pres_up == HIGH || tar_pres_down == HIGH || MenuCancel == HIGH || refill == HIGH)
pres_complete = 0;
}
digitalWrite(buzzer, LOW); //buzzer
delay(1000);
lc.clearDisplay(0);
}
if ( (Menu ==20) && (Mode_init == 1)){
if (!PDPI) {
lc.setChar(0, 0, 'P', false);
lc.setChar(0, 1, 'D', true);
lc.setChar(0, 2, 'P', false);
delay(1000);
PDPI = true; // Set the flag so it doesn't show again
}
Button_Read();
d1 = String(PDPipe,DEC); //Value check
showvalue(PDPipe);
delay_f(20);
delay_f(10);
if ( tar_pres_up == HIGH && PDPipe < 100){
PDPipe++;
EEPROM.write(60,PDPipe);
}
else if ( tar_pres_down == HIGH && PDPipe > 0){
PDPipe--;
EEPROM.write(60,PDPipe);
}
else if(MenuCancel == HIGH){
delay(1000);
Button_Read();
if(MenuCancel == HIGH){
Menu=3;
lc.clearDisplay(0); }
}
}
……………….Setting more parameters
else if ( (Menu ==8) && (Mode_init == 1)){
if(MenuCancel == HIGH){
delay(1000);
Button_Read();
if(MenuCancel == HIGH){
Menu=0;
Mode_init=0;
lc.clearDisplay(0);
isPOfShown = false;
PDPI = false;
TIIS = false;
ASSF = false;
ADDF = false;
}
}}
Button_Read();
if ( (refill == HIGH) && (Mode_init == 1)) {
Menu=0;
Mode_init=0;
isPOfShown = false;
PDPI = false;
TIIS = false;
ASSF = false;
ADDF = false;
lc.clearDisplay(0);
delay(500);
}
}
float MovAvg1(int inputPin)
{
total =0.0;
numReadings = 50.0;
for (int i=0; i<numReadings; i++){
delay(1);
total = total + analogRead(inputPin);
}
average = total / (1.0*numReadings);
Serial.println(average);
return average;
}